3D-spill, 3D-bilder og 3D-videoer er trendteknologi i dag. For forbedret sluttbrukeropplevelse introduserer produsenter mange nye metoder. Hovedfunksjonene bak 3D-teknologien er rotasjonsdeteksjon, orienteringsdeteksjon, bevegelsesregistrering, bevegelsesdeteksjon samt gjenkjenning osv. ... Enhetene som kan måle disse funksjonene er gyroskop og akselerometer. Siden størrelsen på sluttproduktet er veldig liten, bør sensorene som er innebygd i det, også oppfylle kravene til liten størrelse. MPU6050 kom som svar på denne utfordringen. Siden det er den minste enheten som har integrering på både chip og gyroskop. Den kan enkelt bygges inn i en smarttelefon på grunn av den lille størrelsen.
Hva er MPU6050?
MPU6050 er en MEMS-basert 6-akset bevegelsessporingsenhet. Den har et gyroskop på brikken og akselerometer sensorer sammen med temperatur sensor . MPU6050 er en digital enhet. Denne modulen har veldig liten størrelse, har lave strømforbrukskrav, svært nøyaktig, har høy repeterbarhet, høy støktoleranse, den har applikasjonsspesifikk ytelsesprogrammerbarhet og lave forbrukerprispoeng. MPU6050 kan enkelt kobles til andre sensorer som magnetometre og mikrokontrollere.
Blokkdiagram

Blokk-diagram-av-MPU6050
MPU6050-modulen består av følgende blokker og funksjoner.
- En 3-akset MEMS rate gyroskop sensor med tre 16-biters ADC og signal condition.
- En 3-akset MEMS akselerometersensor med tre 16-biters ADC og signalbehandling.
- En digital bevegelsesprosessormotor på brikken.
- Primære 12C digitale kommunikasjonsgrensesnitt.
- Ekstra I2C-grensesnitt for kommunikasjon med eksterne sensorer som magnetometer.
- Intern klokkering.
- Dataregistre for lagring av sensordata.
- FIFO-minne som hjelper til med å redusere strømforbruket.
- Brukerprogrammerbare avbrudd.
- En digital utgangstemperaturføler.
- Selvtest for gyroskop og akselerometer.
- LDO og Bias.
- Ladepumpe.
- Statusregistre.
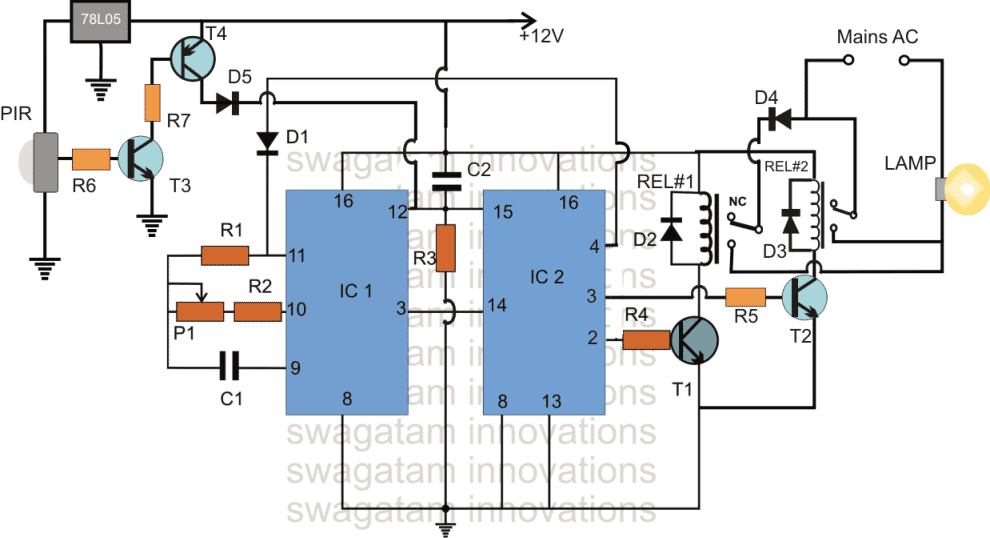
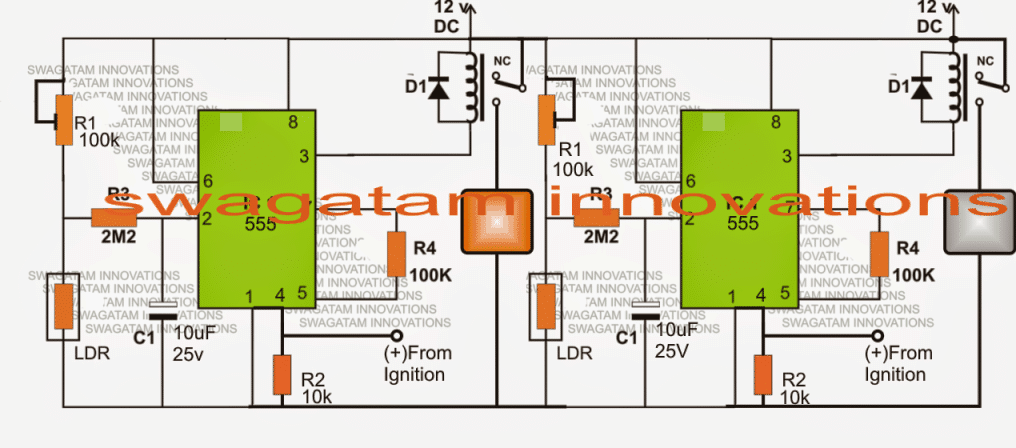
Kretsdiagram
Gyroskopet som er tilstede i MPU6050 kan oppdage rotasjon rundt de tre aksene X, Y, Z. Coriolis-effekten forårsaker en vibrasjon når gyroene roteres rundt en hvilken som helst av aksene. Disse vibrasjonene blir tatt opp av kondensatoren. Det produserte signalet blir deretter forsterket, demodulert og filtrert for å produsere en spenning som er proporsjonal med vinkelhastigheten. Denne spenningen digitaliseres deretter ved hjelp av ADC-er.
DMP til stede på MPU6050 laster ut beregningen av bevegelsesfølende algoritmer fra vertsprosessoren. DMP skaffer seg data fra alle sensorene og lagrer de beregnede verdiene i dataregistrene eller i FIFO. FIFO er tilgjengelig via det serielle grensesnittet. Ved å bruke AD0-pinne kan mer enn en MPU6050-modul kobles til en mikroprosessor. MPU6050 kan enkelt brukes med Arduino , siden MPU6050 har veldokumenterte biblioteker tilgjengelig.
Mens de brukes i applikasjoner, trekkes I2C-linjene til MPU6050 høyt ved hjelp av en 4,7 kΩ motstand, og avbruddspinnen trekkes ned ved hjelp av en 4.7 kΩ motstand. Når data er tilgjengelig i FIFO, går avbruddspinnen høyt. Nå kan en mikrokontroller lese dataene ved hjelp av I2C kommunikasjon buss. Dataene som tilbys fra bibliotekene inneholder følgende dataverdier - Quaternion-komponenter, Euler-vinkler, Yaw, Pitch, Roll, Real-world acceleration, World frame acceleration og Teapot invent sense-verdier.
Pin Diagram

Pin-Diagram-of-MPU-6050
MPU6050 er tilgjengelig som en liten 4 × 4 × 0,9 mm pakke. MEMS-struktur er hermetisk forseglet og limt på vaffelnivå. MPU6050 er tilgjengelig som en 24-pinners QFN-pakke. Pinbeskrivelse av denne modulen er gitt nedenfor-
- Pin-1- CLKIN- er valgfri ekstern referanse klokkeinngang. Denne pinnen er koblet til bakken når den ikke er i bruk.
- Pin-2, Pin-3, Pin-4, Pin-5 er NC-pinner. Disse pins er ikke tilkoblet internt.
- Pin-6, AUX_DA, er den serielle datapinnen til I2C. Denne pinnen brukes til å koble til eksterne sensorer.
- Pin-7, AUX_CL, er I2C master seriell klokke. Denne pinnen brukes til å koble til eksterne sensorer.
- Pin-8, VLOGIC, er den digitale I / O-forsyningsspenningen.
- Pin-9, AD0, er I2C-slaveadressen LSB-pin.
- Pin-10, REGOUT, er regulatorens filterkondensatorforbindelse.
- Pin-11, FSYNC, er rammesynkroniseringens digitale inngang. Denne pinnen er koblet til bakken når den ikke brukes.
- Pin-12, INT, er den digitale avbruddsstiften.
- Pin-13, VDD, er strømforsyningsspenningen.
- Pin-14, Pin-15, Pin-16, Pin-17 er NC-pin. Disse pinnene er ikke koblet internt.
- Pin-18, GND, er strømforsyningsområdet.
- Pin-19 og Pin-21 er RESV-pinnene. Disse pinnene er reservert.
- Pin-20, CPOUT, er tilkobling av ladepumpekondensator.
- Pin-22, er RESV, den reserverte pin.
- Pin-23, SCL, er I2C seriell klokke.
- Pin-24, SDA, er I2C seriell datapinne.
Spesifikasjoner for MPU6050
MPU6050 er verdens første integrerte seks-aksede bevegelsessporingsenhet. Noen av spesifikasjonene til denne modulen er gitt nedenfor-
- MPU6050 har et 3-akset gyroskop, 3-akset akselerometer og en digital bevegelsesprosessor integrert på en enkelt brikke.
- Det fungerer på strømforsyningen til 3V-5V.
- MPU6050 bruker I2C-protokollen for kommunikasjon og overføring av data.
- Denne modulen har en innebygd 16-bit ADC som gir stor nøyaktighet.
- MPU6050 kan grensesnittes med andre IIC-enheter som magnetometre.
- MPU6050 har også en innebygd temperatursensor.
- I2C sensorbuss hjelper den med å samle inn data direkte fra eksternt 3-akset kompass, som den bruker for å gi en komplett 9-akset MotionFusion-utgang.
- For produsenter eliminerer MPU6050 behovet for valg, kvalifisering og systemnivåintegrasjon av diskrete enheter.
- Ved hjelp av I2C-porten kan ikke-treghetsfølere som trykksensor grensesnittes.
- MPU6050 består av tre 16-bits ADC-er for digitalisering av gyroskop 0-utgangene og tre 16-bits ADC-er for digitalisering av akselerometerutgangene.
- Et brukerprogrammerbart gyroskopområde og et brukerprogrammerbart akselerometerområde er til stede for presisjonssporing av både raske og langsomme bevegelser.
- En FIFO-buffer på chip 1024 byte er tilstede som hjelper til med å senke strømforbruket til modulen.
- Behovet for hyppig samling av sensorutgang minimeres ved hjelp av DMP på chip.
- MPU6050 har også en oscillator på chip med ± 1% variasjon.
- MPU6050 har lavpassfilter for gyroskop, akselerometer og temperatursensor.
- VLOGIC referansepinne brukes til å stille inn logiske nivåer for I2C-grensesnittet.
- Det brukerprogrammerbare gyroskopområdet på MPU6050 er ± 250, ± 500, ± 1000 og ± 2000 ° / sek.
- Bilde-, video- og GPS-synkronisering støttes av gyroskopets eksterne synkroniseringspinne.
- Dette gyroskopet har forbedret lavfrekvent støyytelse.
- Gyroskop trenger 3,6 mA strøm for drift.
- Lavpassfilter i gyroskopet er digitalt programmerbart.
- Akselerometer tilstede på MPU6050 fungerer på 500μA strøm.
- Det programmerbare fullskalaområdet til dette akselerometeret er ± 2g, ± 4g, ± 8g og 16g.
- Akselerometeret kan også oppdage retning, trykkdeteksjon.
- Brukerprogrammerbare avbrudd er tilstede for akselerometer.
- Mellom akselerometer- og gyroskopaksene er det en minimal følsomhet på tvers av aksene.
- For å kommunisere med alle registre brukes 400kHz hurtigmodus I2C.
- DMP tilstede på MPU6050 støtter algoritmer for bevegelsesbehandling og bevegelsesgjenkjenning i 3D.
- Sprenglesning er gitt for systemprosessoren. Etter å ha lest data fra FIFO går systemprosessoren i hvilemodus med lav effekt mens MPU samler inn mer data.
- Funksjoner som bevegelsesgjenkjenning, panorering, zooming, rulling, trykkgjenkjenning og shackdeteksjon støttes av de programmerbare avbruddene.
- MPU6050 har også en valgfri ekstern klokkeinngang på 32,768 kHz eller 19,2 MHz.
Bruk av MPU6050
Noen av applikasjonene til denne modulen er gitt nedenfor-
- Denne modulen brukes i Blurfree-teknologi for stabilisering av video eller stillbilder.
- For å gjenkjenne luftbevegelser brukes denne modulen.
- I sikkerhets- og autentiseringssystemene brukes MPU6050 til bevegelsesgjenkjenning.
- For “no-touch” bruker UI applikasjonskontroll og navigering MPU6050.
- I bevegelseskommando-teknologi for bevegelse av snarveier, brukes denne modulen.
- Denne modulen har også funnet anvendelse i bevegelsesaktiverte spill- og applikasjonsrammer.
- I InstantGesture -IG brukes MPU6050 for bevegelsesgjenkjenning.
- På grunn av sin lille størrelse brukes denne modulen i håndsett og bærbart spillutstyr.
- Bevegelsesbaserte spillkontroller har også denne modulen.
- 3D-fjernkontroller, 3D-mus bruker også denne modulen.
- Wearables som brukes til helse, fitness og sport inneholder også MPU6050.
- Denne modulen finnes også i mange leker.
- For IMU-målinger brukes MPU6050.
- I droner og quadcopters brukes MPU6050 til posisjonskontroll.
- Denne modulen har også funnet anvendelse i selvbalanserende roboter.
- MPU6050 er svært foretrukket for robotarmkontroll.
- Humanoid-roboter bruker også denne modulen til tilt, rotasjon, orienteringsdeteksjon.
- I smarttelefoner brukes denne modulen til applikasjoner som utvidet virkelighet, spill, kontroll over bevegelseskommandoer, panoramaopptak og visning.
- Denne modulen har også blitt brukt for stedsbaserte tjenester.
Alternativ IC
Noen av IC-ene som kan brukes som et alternativ til MPU6050 er ADXL335, ADXL345, MPU9250, MPU6000.
Denne modulen er svært foretrukket for bærbare enheter på grunn av sin kompakte størrelse og batteridrevne systemer på grunn av kravene til lavt strømforbruk. MPU6050 kan endre en håndholdt mobil til en kraftig 3D intelligent enhet. Ytterligere detaljer om de elektriske egenskapene og avbruddslogikken til denne modulen finner du i dens datablad . Hvilken mikroprosessor har du grensesnittet MPU6050?