Innlegget diskuterer en elektronisk motorhastighetsregulator eller kontrollerkrets som bruker en RPM-tilbakekoblingssignalsløyfe gjennom et hall-effekt-sensornettverk. Imsa Naga ba om ideen.
Kretsmål og krav
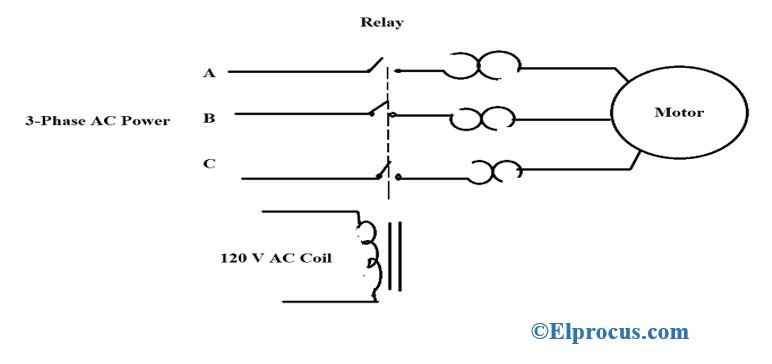
- Tusen takk for tiden din. Jeg tror denne kretsen vil være egnet for enfasetilførsel. Generatoren min er 3-fase 7KvA, og jeg vil koble den med en dieselmotor med en gasspedal i stedet for en fartsregulator.
- Det jeg ønsker å implementere er - En 'ELECTRONIC ENGINE SPEED GOVERNOR' som sannsynligvis ville ha en elektronisk servostyrt mekanisme som - En hastighetssensorkrets (motor RPM-sensor) for å kjøre en servomotor for å aktivere gassmekanismen for å opprettholde en konstant hastighet på motoren i forhold til belastningen på dynamoen.
- Dette vil hjelpe til med å beholde frekvensen så vel som spenningen til generatoren. Jeg ville være i stand til å ta vare på det mekaniske aspektet, hvis du ber om en krets for å kontrollere servomotoren på en slik måte at den kan dreies til begge retninger med hensyn til endringen i motorens turtall. Tusen takk i forventning.
Kretsdiagram

MERKNAD: MOTOREN KAN ERSTATTES MED 12 V fjærbelastet magnetventil
Designet
Kretsen til en dieselmotorhastighetsregulator eller kontroller kan sees i figuren ovenfor ved hjelp av en tilbakemelding RPM-prosessor eller en turteller krets
Venstre IC1 555-trinn danner en enkel turtellerkrets som er konfigurert med en Hall-effekt sensor festet med motorens lasthjul for å registrere turtall.
Turtallet omdannes til en proporsjonalt varierende pulsfrekvens eller frekvens og påføres ved bunnen av en BJT for å veksle pinnen nr. 2 til IC1.
Kretsdrift
IC1 er i utgangspunktet rigget i monostabil modus som får utgangen til å generere en proporsjonalt justerende PÅ / AV-bryter, hvis periode er angitt ved hjelp av den viste 1M potten.
Utgangen fra IC1 som bærer RPM-innholdet i form av utvidede tidsbestemte pulser, blir tilstrekkelig utjevnet av et integrertrinn bestående av et par RC-komponenter ved bruk av motstand 1K, 10K og 22uF. 2.2uF kondensatorer.
Dette trinnet konverterer monostabilens grove RPM-data til en rimelig varierende eller eksponentielt varierende spenning.
Denne eksponentielt varierende spenningen kan sees forbundet med pinne nr. 5 i neste IC2 555-trinn konfigurert som en stabil krets.
Funksjonen til denne astabelen er å generere en veldig smal eller lav PWM-utgang ved pin nr. 3 under normale driftsforhold.
Her refererer normal driftsbetingelse til situasjonen når den registrerte RPM er innenfor den angitte grensen og pin 5 på IC2 ikke får noen spenningsinngang fra emitterfølgeren. Denne lave PWM-utgangen kan implementeres ved å justere de to 100k motstandene og 1uF kondensatoren som er assosiert med IC2 pin # 6/2 og pin # 7.
Denne lave PWM fra pinne nr. 3 i IC2 er ikke i stand til å slå TIP122 tilstrekkelig hardt, og derfor er den angitte motorhjulssammenstillingen ikke i stand til å få det nødvendige momentum og forblir derfor deaktivert.
Imidlertid når turtallet begynner å stige, begynner turtelleren å produsere en eksponentielt høyere spenning som igjen forårsaker en proporsjonalt økende spenning ved stift nr. 5 av IC2.
Dette gjør det mulig for TIP122 å lede hardere, og den tilkoblede motoren får tilstrekkelig dreiemoment, slik at den begynner å trykke den påmonterte gasspedalen mot retardasjonsmodus.
Denne prosedyren tvinger dieselmotoren til å redusere hastigheten, noe som tilsvarende får turtelleren og PWM-trinnene til å gjenopprette sine opprinnelige forhold, og håndheve den nødvendige kontrollerte hastigheten for dieselmotoren.
I stedet for det viste arrangementet av gassmotor, kan samleren til TIP122 alternativt kobles til CDI-enhet av dieselmotoren for identisk hastighetsreduksjon, for å lette en solid tilstand og mer pålitelig implementering av den omtalte elektroniske motorhastighetskontrollen eller den elektroniske motorhastighetsregulatorkretsen.
Hvordan sette opp
Først holder du IC1, IC2-trinnene frakoblet ved å fjerne emitterfølgerleddet med pinne nr. 5 på IC2.
Kontroller deretter at de to 100k-motstandene endres riktig og justeres slik at pinne nr. 3 på IC2 genererer smalest mulig PWM (@ omtrent 5% ON-tidsrate).
Etter dette bruker du en 0 til 12V justerbar strømforsyning , bruk en varierende spenning på pinne nr. 5 på IC2 og bekreft en proporsjonalt økende PWM på pinne nr. 3.
Når den astable delen er testet, må turtelleren sjekkes ved å bruke en kjent RPM-impuls som tilsvarer ønsket over-limit RPM. Under justeringen er emitterfølgeren BJT-base forhåndsinnstilt slik at emitteren er i stand til å generere minst 10V eller et nivå som er nok til at IC2 PWM produserer det nødvendige dreiemomentet på den tilkoblede pedalstyringsmotoren.
Etter ytterligere justering og eksperimentering kan du forvente å oppnå den nødvendige automatiske hastighetskontrollen for motoren og lasten som er forbundet med den.
OPPDATER
Hvis motoren byttes ut med en fjærbelastet solenoid, kan designen ovenfor forenkles som angitt nedenfor:

Magnetakslen kan kobles til gasspedalen for å oppnå den tiltenkte automatiske motorhastighetsreguleringen.
For flere alternativer angående frekvens til spenningsomformer, kan du se på denne artikkelen .
Forrige: Timer Controlled Fitness Gym Application Circuit Neste: Lad batteri med Piezo Mat Circuit