
En trinnmotor er en elektromekanisk enhet som omdanner elektrisk kraft til mekanisk kraft. Det er også en børsteløs, synkron elektrisk motor som kan dele en full rotasjon i et ekspansivt antall trinn. Motorens posisjon kan kontrolleres nøyaktig uten tilbakemeldingsmekanisme, så lenge motoren er nøye tilpasset applikasjonen. Stepper motorer ligner på slått motvilje motorer. Trinnmotoren bruker teorien om magneter for å få motorakselen til å snu en presis avstand når en puls av elektrisitet tilføres. Statoren har åtte poler, og rotoren har seks poler. Rotoren vil kreve 24 pulser med strøm for å bevege de 24 trinnene for å gjøre en fullstendig omdreining. En annen måte å si dette på er at rotoren vil bevege seg nøyaktig 15 ° for hver puls av elektrisitet som motoren mottar.
Konstruksjon og arbeidsprinsipp
De konstruksjon av trinnmotor er ganske relatert til en DC-motor . Den inkluderer en permanent magnet som Rotor som er i midten og den vil snu når kraft virker på den. Denne rotoren er lukket gjennom et nr. av statoren som er viklet gjennom en magnetisk spole over den. Statoren er ordnet nær rotoren slik at magnetfelt i statorene kan kontrollere rotorens bevegelse.

Stepper Motor
Steppermotoren kan styres ved å aktivere hver stator en etter en. Så statoren magnetiserer og fungerer som en elektromagnetisk pol som bruker avstøtende energi på rotoren for å bevege seg fremover. Statorens alternative magnetisering så vel som demagnetisering skifter rotoren gradvis og lar den snu gjennom god kontroll.
De trinnmotor arbeidsprinsipp er elektromagnetisme. Den inkluderer en rotor som er laget med en permanent magnet, mens en stator er med elektromagneter. Når tilførselen til viklingen av statoren vil magnetfeltet bli utviklet i statoren. Nå vil rotoren i motoren begynne å bevege seg med det roterende magnetfeltet til statoren. Så dette er det grunnleggende arbeidsprinsippet til denne motoren.

Stepper Motor Construction
I denne motoren er det et mykt jern som er lukket gjennom de elektromagnetiske statorene. Statorene og rotoren er ikke avhengig av typen stepper. Når statorene til denne motoren er aktivert, vil rotoren rotere for å stille seg opp med statoren, ellers vil den ha minst gap gjennom statoren. På denne måten aktiveres statorene i en serie for å dreie trinnmotoren.
Kjøreteknikker
Stepper motor kjøringsteknikk s kan være mulig med noen spesielle kretser på grunn av deres komplekse design. Det er flere metoder for å kjøre denne motoren, noen av dem blir diskutert nedenfor ved å ta et eksempel på en firefas trinnmotor.
Single Excitation Mode
Den grunnleggende metoden for å kjøre en trinnmotor er en enkelt eksitasjonsmodus. Det er en gammel metode og brukes ikke mye for tiden, men man må vite om denne teknikken. I denne teknikken vil hver fase ellers utløses stator ved siden av hverandre en etter en alternativt med en spesiell krets. Dette vil magnetisere og demagnetisere statoren for å bevege rotoren fremover.
Full Step Drive
I denne teknikken aktiveres to statorer om gangen i stedet for en i en veldig kortere tidsperiode. Denne teknikken resulterer i høyt dreiemoment og lar motoren kjøre den høye belastningen.
Half Step Drive
Denne teknikken er ganske relatert til Full step-stasjonen, fordi de to statorene blir ordnet ved siden av hverandre slik at den blir aktivert først, mens den tredje aktiveres etter det. Denne typen syklus for å bytte to statorer først og etter at den tredje statoren vil kjøre motoren. Denne teknikken vil resultere i forbedret oppløsning av trinnmotoren mens dreiemomentet reduseres.
Micro Stepping
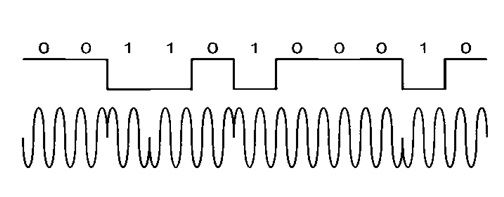
Denne teknikken brukes oftest på grunn av nøyaktigheten. Den variable trinnstrømmen vil levere av stepper motor driver krets mot statorspoler i form av en sinusformet bølgeform. Nøyaktigheten til hvert trinn kan forbedres med denne lille trinnstrømmen. Denne teknikken brukes mye fordi den gir høy nøyaktighet, samt reduserer driftsstøy i stor grad.
Stepper Motor Circuit & Its Operation
Stepper motorer fungerer annerledes enn DC børstemotorer , som roterer når spenning tilføres terminalene. Steppermotorer har derimot effektivt flere tannede elektromagneter anordnet rundt et sentralt girformet jernstykke. Elektromagnetene får energi fra en ekstern kontrollkrets, for eksempel en mikrokontroller.

Stepper Motor Circuit
For å få motorakselen til å dreie, får først en elektromagnet kraft, noe som gjør tannhjulets tenner magnetisk tiltrukket av elektromagnetens tenner. På det tidspunktet tannhjulets tenner dermed er innrettet mot den første elektromagneten, blir de litt forskjøvet fra neste elektromagnet. Så når neste elektromagnet slås PÅ og den første slås AV, roterer giret litt for å justere seg med det neste, og derfra gjentas prosessen. Hver av disse små rotasjonene kalles et trinn, med et helt antall trinn som gjør en full rotasjon.
På den måten kan motoren dreies med en presis. Stepper motor roterer ikke kontinuerlig, de roterer trinnvis. Det er 4 spoler med en 90ellervinkel mellom hverandre festet på statoren. Steppermotorforbindelsene bestemmes av måten spolene er sammenkoblet på. I en trinnmotor er ikke spolene koblet til. Motoren har en 90ellerrotasjonstrinn med spolene som får energi i en syklisk rekkefølge, og bestemmer akselens rotasjonsretning.
Arbeidet til denne motoren vises ved å betjene bryteren. Spolene aktiveres i serie i intervaller på 1 sekund. Akselen roterer 90ellerhver gang neste spole aktiveres. Dreiemomentet med lav hastighet vil variere direkte med strømmen.
Typer av trinnmotor
Det er tre hovedtyper av trinnmotorer, de er:
- Permanent magnetsteg
- Hybrid synkron stepper
- Stepper med variabel motvilje
Permanent magnetisk trinnmotor
Permanente magnetmotorer bruker en permanentmagnet (PM) i rotoren og virker på tiltrekningen eller frastøtingen mellom rotoren PM og statorelektromagnetene.
Dette er den vanligste typen trinnmotor sammenlignet med forskjellige typer trinnmotorer som er tilgjengelige i markedet. Denne motoren inkluderer permanente magneter i konstruksjonen av motoren. Denne typen motor er også kjent som tinn-kan / kan-stabelmotor. Den største fordelen med denne trinnmotoren er mindre produksjonskostnader. For hver revolusjon har den 48-24 trinn.
Stepper Motor med variabel motstand
Motorer med variabel motstand (VR) har en vanlig jernrotor og fungerer basert på prinsippet om at minimum uvilje oppstår med et minimalt gap, og derfor tiltrekkes rotorpunktene mot statormagnetpolene.
Stepper motor som variabel motstand er den grunnleggende typen motor, og den har blitt brukt de siste mange årene. Som navnet antyder, avhenger rotorens vinkelposisjon hovedsakelig av magnetkretsens motvilje som kan dannes blant tennene på statoren så vel som en rotor.
Hybrid synkron trinnmotor
Hybride trinnmotorer er oppkalt fordi de bruker en kombinasjon av permanentmagnet (PM) og variabel motstand (VR) for å oppnå maksimal effekt i små pakningsstørrelser.
Den mest populære typen motor er hybrid trinnmotor fordi det gir god ytelse sammenlignet med en permanent magnetrotor når det gjelder hastighet, trinnoppløsning og holdemoment. Men denne typen trinnmotor er dyr sammenlignet med trinnmotorer med permanentmagnet. Denne motoren kombinerer funksjonene til både den permanente magneten og trinnmotorer med variabel motstand. Disse motorene brukes der mindre trinnvinkel kreves som 1,5, 1,8 og 2,5 grader.
Hvordan velge en trinnmotor?
Før du velger en trinnmotor for ditt behov, er det veldig viktig å undersøke motorens dreiemomenthastighetskurve. Så denne informasjonen er tilgjengelig fra designeren av motoren, og det er et grafisk symbol på motorens dreiemoment med en spesifisert hastighet. Motorens dreiemoment-hastighetskurve skal stemme overens med nødvendighetene i applikasjonen, ellers kan ikke forventet systemytelse oppnås.
Typer ledninger
Stepper motorene er vanligvis to-fase motorer som unipolar ellers bipolar. For hver fase i en unipolar motor er det to viklinger. Her er senter-tappet en vanlig ledning mellom to viklinger mot en stang. Den unipolare motoren har 5 til 8 ledninger.
I konstruksjonen, der det felles av to poler er delt, uansett sentrert, inkluderer denne trinnmotoren seks ledninger. Hvis de to-polede senterkranene er korte innvendig, inkluderer denne motoren fem ledninger. Unipolar med 8 ledninger vil legge til rette for både seriekobling og parallellkobling mens motoren med fem ledninger eller seks ledninger har statorspirals seriekobling. Driften av den unipolare motoren kan forenkles fordi det ikke er behov for å reversere strømmen i drivkretsen, som er kjent som bifilarmotorer mens du bruker dem.
I en bipolar trinnmotor, for hver pol, er det en enkelt vikling. Forsyningsretningen må endres gjennom drivkretsen slik at den blir kompleks, slik at disse motorene kalles unike motorer.
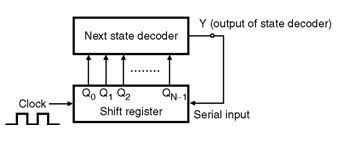
Stepper Motor Control av varierende klokkepulser
Stepper motor kontroll krets er en enkel og billig krets, hovedsakelig brukt i applikasjoner med lav effekt. Kretsen er vist i figuren, som består av 555 timere IC som en stabil multivibrator. Frekvensen beregnes ved å bruke det gitte forholdet.
Frekvens = 1 / T = 1,45 / (RA + 2RB) C Hvor RA = RB = R2 = R3 = 4,7 kilo-ohm og C = C2 = 100 µF.

Stepper Motor Control av varierende klokkepulser
Utgangen fra tidtakeren brukes som en klokke for to 7474 doble 'D' flip-flops (U4 og U3) konfigurert som en ringteller. Når strømmen først er slått på, er bare den første flip-flop satt (dvs. Q-utgang på pin 5 i U3 vil være på logikk '1'), og de andre tre flip-flops tilbakestilles (dvs. at utgangen til Q er logisk 0). Ved mottak av en klokkepuls blir den logiske '1' utgangen fra den første flip-flop flyttet til den andre flip-flop (pin 9 i U3).
Dermed fortsetter logikk 1-utgang sirkulært med hver klokkepuls. Q-utgangene til alle de fire flip-flops forsterkes av Darling-tonns transistorarrays inne i ULN2003 (U2) og kobles til trinnmotorviklingene oransje, brun, gul, svart til 16, 15,14, 13 av ULN2003 og den røde til + har forsyning.
Det vanlige punktet for viklingen er koblet til + 12V DC-forsyning, som også er koblet til pin 9 på ULN2003. Fargekoden som brukes til viklingene, kan variere fra merke til merke. Når strømmen slås på, blir styresignalet som er koblet til SET-pinnen til den første flip-flop og CLR-pinnene til de andre tre flip-floppene, aktivt 'lavt' (på grunn av tilbakestillingskretsen som dannes av R1 -C1-kombinasjon) for å stille inn den første flip-flop og tilbakestille de resterende tre flip-flops.
Ved tilbakestilling blir Q1 på IC3 'høy' mens alle andre Q-utganger blir 'lave'. En ekstern tilbakestilling kan aktiveres ved å trykke på tilbakestillingsbryteren. Ved å trykke på tilbakestillingsbryteren kan du stoppe trinnmotoren. Motoren begynner å rotere i samme retning igjen ved å slippe tilbakestillingsbryteren.
Forskjellen mellom trinnmotor og servomotor
Servomotorer er egnet for applikasjoner med høyt dreiemoment og hastighet, mens trinnmotoren er billigere, så de brukes der det er høyt dreiemoment, akselerasjon med lavt til medium, den ellers brukbare fleksibiliteten med lukket sløyfe. Forskjellen mellom trinnmotor og servomotor inkluderer følgende.
| Stepper Motor | Servo motor |
| Motoren som beveger seg i diskrete trinn er kjent som trinnmotoren. | En servomotor er en slags motor med lukket sløyfe som er koblet til en koder for å gi tilbakemelding og posisjon.
|
| Stepper motor brukes der kontroll, så vel som presisjon, er hovedprioritetene | Servomotor brukes der hastigheten er hovedprioriteten
|
| Den totale poltellingen på trinnmotoren varierer fra 50 til 100 | Det totale poltallet for servomotorer varierer fra 4 til 12 |
| I et lukket system beveger disse motorene seg med en jevn puls | Disse motorene trenger en koder for å endre pulser for å kontrollere posisjonen.
|
| Dreiemomentet er høyt i mindre hastighet | Dreiemomentet er lavt i høy hastighet |
| Posisjoneringstiden er raskere gjennom korte slag | Posisjoneringstiden er raskere gjennom lange slag |
| Treghetsbevegelse av treghet | Treghetsbevegelse med lav toleranse |
| Denne motoren er egnet for mekanismer med lav stivhet som remskive og belte | Ikke egnet for mekanisme med mindre stivhet |
| Responsen er høy | Responsen er lav |
| Disse brukes til svingende belastninger | Disse brukes ikke til svingende belastninger |
| Justering av forsterkning / innstilling er ikke nødvendig | Justering av forsterkning / innstilling er nødvendig |
Stepper Motor vs DC Motor
Både trinn- og likestrømsmotorer brukes i forskjellige industrielle applikasjoner, men hovedforskjellene mellom disse to motorene er litt forvirrende. Her lister vi opp noen vanlige kjennetegn mellom disse to designene. Hver karakteristikk er diskutert nedenfor.
Kjennetegn | Stepper Motor | DC-motor |
| Kontrollegenskaper | Enkelt og bruker mikrokontroller | Enkelt og uten ekstrautstyr kreves |
| Hastighetsområde | Lavt fra 200 til 2000 RPM | Moderat |
| Pålitelighet | Høy | Moderat |
| Effektivitet | Lav | Høy |
| Moment- eller hastighetsegenskaper | Høyeste dreiemoment med færre hastigheter | Høyt dreiemoment med færre hastigheter |
| Koste | Lav | Lav |
Parametere til trinnmotor
Stepper motor parametrene inkluderer hovedsakelig trinnvinkel, trinn for hver omdreining, trinn for hvert sekund og RPM.
Trinnvinkel
Stegmotorens trinnvinkel kan defineres som vinkelen som motorens rotor dreier seg med når en enkelt puls er gitt til statorens inngang. Oppløsningen til motoren kan defineres som antall trinn i motoren og antall omdreininger til rotoren.
Oppløsning = antall trinn / antall rotorer
Motorens arrangement kan bestemmes gjennom trinnvinkelen og den uttrykkes i grader. Oppløsningen til en motor (trinnnummeret) er nei. av trinn som gjør innen en rotasjon av rotoren. Når trinnvinkelen til motoren er liten, er oppløsningen høy for arrangementet av denne motoren.
Nøyaktigheten av gjenstandene til gjenstandene gjennom denne motoren avhenger hovedsakelig av oppløsningen. Når oppløsningen er høy, vil nøyaktigheten være lav.
Noen nøyaktighetsmotorer kan lage 1000 trinn i en enkelt omdreining inkludert 0,36 grader trinnvinkel. En typisk motor inkluderer 1,8 grader trinnvinkel med 200 trinn for hver omdreining. De forskjellige trinnvinklene som 15 grader, 45 grader og 90 grader er veldig vanlige i vanlige motorer. Antall vinkler kan endres fra to til seks, og en liten trinnvinkel kan oppnås gjennom spaltede poldeler.
Fremgangsmåte for hver revolusjon
Trinnene for hver oppløsning kan defineres som antall trinnvinkler som er nødvendige for en total revolusjon. Formelen for dette er 360 ° / trinnvinkel.
Fremgangsmåte for hvert sekund
Denne typen parameter brukes hovedsakelig til å måle antall trinn dekket i hvert sekund.
Revolusjon per minutt
Turtallet er revolusjonen per minutt. Den brukes til å måle frekvensen av revolusjon. Så ved å bruke denne parameteren kan vi beregne antall omdreininger i løpet av et minutt. Hovedforholdet mellom trinnene til trinnmotoren er som følger.
Trinn for hvert sekund = revolusjon per minutt x trinn per revolusjon / 60
Stepper Motor-grensesnitt med 8051 mikrokontroller
Stegmotorgrensesnitt med 8051 er veldig enkelt ved å bruke tre moduser som bølgedrift, fullstegsdrift og halvtrinnsstasjon ved å gi 0 og 1 til motorens fire ledninger basert på hvilken drivmodus vi må velge for å kjøre denne motoren.
De resterende to ledningene må kobles til en spenningsforsyning. Her brukes den unipolare trinnmotoren der de fire endene av spolene er koblet til de primære fire pinnene på port-2 i mikrokontrolleren ved bruk av ULN2003A.
Denne mikrokontrolleren leverer ikke tilstrekkelig strøm til å drive spolene, slik at den nåværende driver IC liker ULN2003A. ULN2003A må brukes, og det er samlingen av 7 par NPN Darlington-transistorer. Utformingen av Darlington-paret kan gjøres gjennom to bipolare transistorer som er koblet for å oppnå maksimal strømforsterkning.
I ULN2003A driver IC er inngangspinnene 7, utgangspinnene er 7, hvor to pinner er for strømforsyning og jordterminaler. Her brukes 4-inngangs- og 4-utgangspinner. Som et alternativ til ULN2003A brukes L293D IC også for forsterkning av strøm.
Du må observere to vanlige ledninger og fire spoleledninger veldig nøye, ellers vil ikke trinnmotoren snu. Dette kan observeres ved å måle motstanden gjennom et multimeter, men multimeteret viser ingen avlesninger blant de to ledningene. Når den vanlige ledningen og de andre to ledningene er i den like fasen, må den vise en lignende motstand, mens de to spolens sluttpunkter i den samme fasen vil demonstrere den dobbelte motstanden sammenlignet med motstanden mellom felles punkt og ett endepunkt.
Feilsøking
- Feilsøking er prosessen for å kontrollere motorstatusen om motoren fungerer eller ikke. Følgende sjekkliste brukes til å feilsøke trinnmotoren.
- Først må du kontrollere tilkoblingene samt koden til kretsen.
- Hvis det er ok, må du deretter kontrollere at motoren får riktig spenningsforsyning, ellers vibrerer den bare, men ikke roterer.
- Hvis spenningsforsyningen er bra, må du kontrollere endepunktene til firespolen som er alliert med ULN2003A IC.
- Først skal du oppdage de to generelle endepunktene og fikse dem til 12v-forsyning, deretter feste de resterende fire ledningene til IC ULN2003A. Forsøk alle mulige kombinasjoner til trinnmotoren starter. Hvis tilkoblingen av dette ikke er riktig, vil denne motoren vibrere i stedet for å dreie.
Kan Stepper Motors kjøre kontinuerlig?
Vanligvis kjører eller roterer alle motorene kontinuerlig, men de fleste motorer kan ikke stoppe mens de er under strøm. Når du prøver å begrense akselen til en motor når den er under strømforsyning, vil den brenne eller gå i stykker.
Alternativt er trinnmotorer designet for å lage et diskret trinn, og vent deretter trinnet igjen og vær der. Hvis vi vil få motoren til å holde seg på ett sted i kortere tid før vi går igjen, vil det se ut som å rotere kontinuerlig. Strømforbruket til disse motorene er høyt, men kraftavledningen skjer hovedsakelig når motoren er stoppet eller utformet dårlig, så er det en sjanse for overoppheting. På grunn av dette reduseres motorens strømforsyning ofte når motoren er i holdeposisjon over lengre tid.
Hovedårsaken er at når motoren roterer, kan den elektriske inngangsdelen endres til mekanisk kraft. Når motoren stoppes mens den roterer, kan all inngangseffekt endres til varme på innsiden av spolen.
Fordeler
De fordelene med trinnmotor Inkluder følgende.
- Robushet
- Enkel konstruksjon
- Kan fungere i et åpent sløyfesystem
- Vedlikeholdet er lite
- Det fungerer i alle situasjoner
- Påliteligheten er høy
- Motorens rotasjonsvinkel er proporsjonal med inngangspulsen.
- Motoren har fullt dreiemoment ved stillstand.
- Nøyaktig posisjonering og repeterbarhet av bevegelse siden gode trinnmotorer har en nøyaktighet på 3-5% av trinn, og denne feilen er ikke kumulativ fra trinn til trinn.
- Utmerket respons på start, stopp og reversering.
- Veldig pålitelig siden det ikke er kontaktbørster i motoren. Derfor er motorens levetid ganske enkelt avhengig av lagerets levetid.
- Motorens respons på digitale inngangspulser gir kontroll med åpen sløyfe, noe som gjør motoren enklere og mindre kostbar å kontrollere.
- Det er mulig å oppnå synkron rotasjon med veldig lav hastighet med en last som er direkte koblet til akselen.
- Et bredt spekter av rotasjonshastigheter kan realiseres ettersom hastigheten er proporsjonal med frekvensen til inngangspulsene.
Ulemper
De ulemper med trinnmotor Inkluder følgende.
- Effektiviteten er lav
- Dreiemomentet til en motor vil avta raskt med hastighet
- Nøyaktigheten er lav
- Tilbakemelding brukes ikke til å spesifisere potensielle tapte trinn
- Lite moment mot treghetsforhold
- Ekstremt bråkete
- Hvis motoren ikke kontrolleres riktig, kan resonanser oppstå
- Betjening av denne motoren er ikke lett ved veldig høye hastigheter.
- Den dedikerte kontrollkretsen er nødvendig
- Sammenlignet med DC-motorer bruker den mer strøm
applikasjoner
De applikasjoner av trinnmotor Inkluder følgende.
- Industrielle maskiner - Stepper motorer brukes i bilmålere og maskinverktøy automatisert produksjonsutstyr.
- Sikkerhet - nye overvåkingsprodukter for sikkerhetsindustrien.
- Medisinsk - Steppermotorer brukes i medisinske skannere, prøvetakere, og finnes også i digital tannfotografering, væskepumper, åndedrettsvern og blodanalysemaskiner.
- Forbrukerelektronikk - Stepper motorer i kameraer for automatiske digitale kamera fokus og zoom funksjoner.
Og har også applikasjoner for forretningsmaskiner, applikasjoner for periferiutstyr for datamaskiner.
Dermed handler dette om en oversikt over trinnmotoren som konstruksjon, arbeidsprinsipp, forskjeller, fordeler, ulemper og dets applikasjoner. Nå har du en ide om hvilke typer supermotorer og deres applikasjoner hvis du har spørsmål om dette emnet eller det elektriske og elektroniske prosjekter la kommentarene nedenfor.
Fotokreditt
- Stepper Motor av MST


{kind=link}