Servospenningsstabilisator
Å servo spenningsstabilisator er en lukket sløyfekontrollmekanisme som tjener til å opprettholde balansert 3 eller enfaset spenningsutgang til tross for svingninger ved inngangen på grunn av ubalanserte forhold. De fleste industrielle belastninger er 3-fase induksjonsmotorbelastninger, og i et reelt fabrikkmiljø er spenningen i 3 faser sjelden balansert. Si for eksempel hvis de målte spenningene er 420, 430 og 440V, er gjennomsnittet 430V og avviket er 10V.
Prosentandelen av ubalanse er gitt av
(10V X 100) / 430V = 2.3% Det er sett at 1% spenningsubalanse vil øke motortapene med 5%.
Dermed kan spenningsubalanse øke motortapene fra 2% til 90%, og temperaturen øker dermed også for mye, noe som resulterer i ytterligere økte tap og redusert effektivitet. Derfor foreslås det å ta opp et prosjekt for å opprettholde en balansert utgangsspenning i alle tre faser.
Enkel fase:
Det er basert på prinsippet om vektortilsetning av AC-spenning til inngangen for å få ønsket utgang ved hjelp av en transformator kalt Buck-Boost-transformator (T), hvis sekundære er koblet i serie med inngangsspenningen. Den primære av den samme mates fra en motormontert variabel transformator (R). Avhengig av forholdet mellom primær og sekundær spenning, kommer den induserte spenningen til sekundærspenningen enten i fase eller ut av fase basert på spenningssvingninger . Den variable transformatoren mates vanligvis fra inngangsforsyningen i begge ender mens tapping på rundt 20% av viklingen blir tatt som et fast punkt for den primære av Buck-Boost-transformatoren. Auto-transformatorens variable punkt er derfor i stand til å levere 20% ut av fasespenningen som brukes til bukkdrift, mens 80% som er i fase med inngangsspenningen og brukes til å øke driften. Vindusviskerbevegelsen til den variable transformatoren styres ved å registrere utgangsspenningen til en kontrollkrets som bestemmer rotasjonsretningen til den synkrone motoren som mates gjennom et par TRIACer til den delte faseviklingen.
3-faset balansert inngangskorrigering:
For drift med lav kapasitet, si ca. 10KVA, er det for øyeblikket sett at en dobbel sårvariasjon blir brukt og eliminerer Buck-Boost-transformatoren på selve den variable transformatoren. Dette begrenser viskerbevegelsen til en variab til 250 grader ettersom vekten brukes til sekundærviklingen. Selv om dette gjør systemet økonomisk, har det alvorlige ulemper når det gjelder påliteligheten. Bransjestandarden godtar aldri en slik kombinasjon. I områder med rimelig balansert inngangsspenning brukes også trefasede servostyrte korrigatorer for stabilisert utgang, mens en enkelt trefasevariac brukes montert av en synkron motor og et enkelt kontrollkort som registrerer tofasespenningen av tre. Dette er mye mer økonomisk og nyttig hvis inngangsfasene er rimelig balanserte. Det har ulempen at mens alvorlig ubalansering finner sted, er produksjonen proporsjonalt ubalansert.
3-fase ubalansert inngangskorrigering:
Tre serietransformatorer (T1, T2, T3), hvor hvert sekund brukes, en i hver fase som enten legger til eller trekker fra spenningen fra inngangsforsyningsspenningen for å levere konstant spenning i hver fase og derved lage den balanserte utgangen fra ubalansert inngang. Inngangen til primæren til serietransformatoren mates fra hver fase fra en hver variabel autotransformator (Variac) (R1, R2, R3) som hver visker er koblet til en synkronmotor med delt delt fase (2 spoler) (M1, M2 M3). Motoren mottar vekselstrøm for hver av sine spoler gjennom tyristorkobling for enten med eller mot klokka for å muliggjøre ønsket utgangsspenning fra variabelen til primæren til serietransformatoren, enten i fase eller ut av fase, for å utføre tillegg eller subtraksjoner som nødvendig ved sekundæren av serietransformatoren for å opprettholde en konstant og balansert spenning ved utgangen. Tilbakemelding fra utgangen til kontrollkretsen (C1, C2, C3) sammenlignes med en fast referansespenning av nivåkomparatorer dannet av op-ampere for til slutt å utløse TRIAC i henhold til behovet for å aktivere motoren.
Dette skjemaet består hovedsakelig av en styringskrets, enfaset servoinduksjonsmotor koblet til en variabel mating primær av en serietransformator for hver fase.
- Styringskrets som består av en vinduskomparator koblet rundt transistorer og RMS-feil signalforsterkning av IC 741, er rigget opp i Multisim og er simulert for forskjellige inngangsdriftforhold som sikrer at avfyring av TRIAC-ene som vil betjene kondensatorens faseforskyvede induksjonsmotor er nødvendig retning som styrer rotasjonen på variaceviskeren.
- Basert på maksimums- og minimumsverdiene for spenningssvingninger, er serietransformatorer og kontrolltransformatorer designet med standardformel som samsvarer med den kommersielt tilgjengelige jernkjernen og superemaliserte kobbertrådstørrelsen før den vikles den samme for bruk i prosjektet.
Teknologi:
I et balansert 3-faset kraftsystem har alle spenningene og strømene samme amplitude og faseforskyves 120 grader fra hverandre. Imidlertid er det ikke mulig praktisk talt ettersom ubalanserte spenninger kan føre til uheldige effekter på utstyr og det elektriske distribusjonssystemet.
Under ubalanserte forhold vil distribusjonssystemet medføre flere tap og varmeeffekter, og være mindre stabilt. Effekten av ubalanse i spenning kan også være skadelig for utstyr som induksjonsmotorer, kraftelektroniske omformere og justerbare hastighetsdrev (ASD). En relativt liten prosentandel av ubalanse i spenning med trefasemotor resulterer i en betydelig økning i motortap, noe som også medfører en reduksjon i effektiviteten. Energikostnadene kan minimeres i mange applikasjoner ved å redusere motoreffekten som går tapt på grunn av ubalanse i spenningen.
Prosentuell spenningsubalanse er definert av NEMA som 100 ganger avviket fra linjespenningen fra gjennomsnittsspenningen delt på gjennomsnittsspenningen. Hvis de målte spenningene er 420, 430 og 440V, er gjennomsnittet 430V og avviket er 10V.
Prosent ubalansen er gitt av (10V * 100 / 430V) = 2,3%
Dermed øker 1% spenningsubalanse motortapene med 5%.
Derfor er ubalanse et alvorlig kraftkvalitetsproblem, som hovedsakelig påvirker lavspent distribusjonssystemer, og det foreslås derfor i prosjektet å opprettholde balansert spenning angående størrelsen i hver fase, og dermed opprettholde balansert linjespenning.
INTRODUKSJON:
AC-spenningsstabilisatorer er ment for å oppnå et stabilisert AC strøm fra svingningene innkommende strøm. De finner applikasjoner innen alle felt av elektrisk, elektronisk og mange andre bransjer, forskningsinstitusjoner som tester laboratorier, utdanningsinstitusjoner, etc.
Hva er ubalanse:
Ubalansetilstand refererer til tilstanden når 3-fasespenningene og -strømmene ikke har samme amplitude eller samme faseforskyvning.
Hvis en eller begge av disse betingelsene ikke er oppfylt, kalles systemet ubalansert eller asymmetrisk. (I denne teksten antas det implisitt at bølgeformene er sinusformede og dermed ikke inneholder harmoniske.)
Årsaker til ubalanse:
Systemoperatøren prøver å gi en balansert systemspenning ved PCC mellom distribusjonsnettet og kundens interne nettverk.
Utgangsspenningene i trefasesystemet avhenger av utgangsspenningene til generatorene, impedansen til systemet og belastningsstrømmen.
Men siden det meste brukes synkron generatorer, er de genererte spenningene svært symmetriske, og derfor kan ikke generatorene være årsaken til ubalanse. Tilkoblinger på lavere spenningsnivåer har vanligvis høy impedans som fører til potensielt større spenningsubalanse. Impedansen til systemkomponentene påvirkes av konfigurasjonen av luftledninger.
Konsekvenser av ubalanse i spenning:
Følsomheten til elektrisk utstyr for ubalanse er forskjellig fra apparat til apparat. En kort oversikt over de vanligste problemene er gitt nedenfor:
(a) Induksjonsmaskiner:
Dette er a.c. synkronmaskiner med internt induserte roterende magnetfelt, hvis størrelse er proporsjonal med amplituden til direkte og / eller inverse komponenter. Derfor, i tilfelle av en ubalansert forsyning, blir det roterende magnetfeltet elliptisk i stedet for sirkulært. Induksjonsmaskiner møter således hovedsakelig tre typer problemer på grunn av ubalanse i spenningen
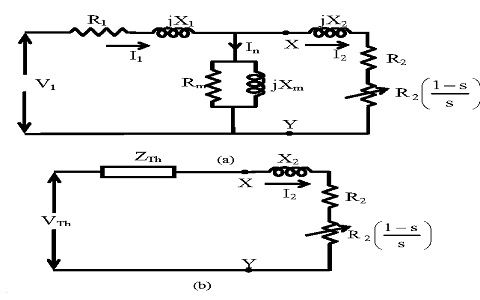
1. For det første kan ikke maskinen produsere sitt fulle dreiemoment ettersom det omvendt roterende magnetfeltet til det negative sekvenssystemet produserer et negativt bremsemoment som må trekkes fra grunnmomentet knyttet til det normale roterende magnetfeltet. Den følgende figuren viser de forskjellige momentglidekarakteristikkene til en induksjonsmaskin under ubalansert forsyning

2. For det andre kan lagrene lide mekanisk skade på grunn av induserte momentkomponenter ved dobbelt systemfrekvens.
3. Til slutt oppvarmes statoren og spesielt rotoren for mye, muligens fører til raskere termisk aldring. Denne varmen er forårsaket av induksjon av betydelige strømmer av det raskt roterende (i relativ forstand) inverse magnetfeltet, sett av rotoren. For å kunne takle denne ekstra oppvarmingen, må motoren klassifiseres, noe som kan kreve at det installeres en maskin med større effekt.
TEKNO-ØKONOMI:
Spenningsubalansen kan forårsake for tidlig motorfeil, som ikke bare fører til planlagt nedstenging av systemet, men også forårsaker stort økonomisk tap.
Effekten av lav og høy spenning på motorer og tilhørende ytelsesendringer som kan forventes når vi bruker andre spenninger enn de som er angitt på typeskiltet, er gitt som følger:
Effekter av lavspenning:
Når en motor utsettes for spenninger under typeskiltet, vil noen av motorens egenskaper endre seg litt og andre vil endre seg dramatisk.
Mengden kraft som trekkes fra ledningen må fikses for en fast mengde belastning.
Mengden kraft motoren trekker har en grov korrelasjon med spenningen til strømmen (ampere).
For å holde like mye strøm, hvis forsyningsspenningen er lav, fungerer en økning i strøm som kompensasjon. Det er imidlertid farlig ettersom høyere strøm fører til at det samler seg mer varme i motoren, som til slutt ødelegger motoren.
Dermed er ulempene ved å påføre lavspenning overoppheting av motoren og motoren blir skadet.
Startmomentet, tiltrekkingsmomentet og uttrekkingsmomentet for større belastning (induksjonsmotorer), basert på den påførte spenningen i kvadrat.
Generelt kan en reduksjon på 10% fra spenningsverdien føre til lavt startmoment, trekke opp og trekke ut dreiemoment.
Effekter av høyspenning:
Høyspenning kan føre til at magneter blir mettede, noe som får motoren til å trekke for mye strøm for å magnetisere jernet. Dermed kan også høyspenning føre til skader. Høyspenning reduserer også effektfaktoren og forårsaker en økning i tapene.
Motorer tåler visse modifikasjoner i spenningen over designspenningen. Når ytterpunktene over designspenningen vil føre til at strømmen øker med tilsvarende endringer i oppvarming og en forkortelse av motorens levetid.
Spenningsfølsomheten påvirker ikke bare motorer, men også andre enheter. Solenoidene og spolene som finnes i releer og startere tåler lavspenning bedre enn de gjør høy spenning. Andre eksempler er forkoblinger i lysstoffarmaturer for lysstoffrør, kvikksølv og høyt trykk og transformatorer og glødelamper.
Samlet sett er det bedre for utstyret hvis vi endrer kranene på innkommende transformatorer for å optimalisere spenningen på anleggsbunnen til noe nær utstyrsklassifiseringene, som er hovedkonseptet bak det foreslåtte konseptet med spenningsstabilisering i prosjektet.
Regler for å bestemme forsyningsspenningen
- Små motorer har en tendens til å være mer følsomme for overspenning og metning enn store motorer.
- Enfasede motorer har en tendens til å være mer følsomme for overspenning enn 3-fasede motorer.
- U-rammotorer er mindre følsomme for overspenning enn T-rammer.
- Førsteklasses effektivitet Super-E-motorer er mindre følsomme for overspenning enn standardeffektivitetsmotorer.
- 2- og 4-polede motorer er mindre påvirket av høyspenning enn 6- og 8-polede design.
- Overspenning kan øke strømstyrken og temperaturen selv på lett belastede motorer
- Effektiviteten påvirkes også ettersom den blir redusert med lav eller høy spenning
- Effektfaktoren reduseres med høyspenning.
- Startstrømmen øker med høyere spenning.
Få mer kunnskap om ulike elektroniske konsepter og kretser ved å gjøre litt mini elektronikkprosjekter på ingeniørnivå.