I dette innlegget vil vi diskutere det grunnleggende om montering av quadcopter-kropp ved bruk av aluminiumsrør og -bolter, i de senere delene av artikkelen vil vi også diskutere om en enkel dronekrets som kan brukes til å fly en liten droneenhet uten å avhenge av komplekse mikrokontrollere.
Et quadcopter er kanskje den enkleste flymaskinen som krever minimum mengde aerodynamisk nøyaktighet og komplikasjoner, og derfor er det ingen overraskelse, det kan få en enorm popularitet blant de forskjellige hobbyistene som med hell kunne bygge dette ... en maskin som de faktisk kunne fly og kontroll etter egen vilje.
Quadcopter Dynamics
Det faktum at en quadcopter drone er den enkleste når det gjelder tekniskitet og dynamikk, skyldes faktisk involvering av 4 propeller og en balansert rammestruktur, som gjør at maskinen kan fly med relativt god likevekt, selv under vanskelige klimatiske forhold.
Men enkelhet innebærer også at systemet kanskje ikke er så effektivt som de konvensjonelle fly- og helikoptermodellene som er intrikat designet for å vise ekstrem effektivitet når det gjelder hastighet og drivstofforbruk, og selvfølgelig bæreevne ... alle disse kan i det vesentlige være mangler et typisk quadcopter-system.
Likevel, når det gjelder et hobbyprosjekt, blir denne maskinen det ideelle valget for de fleste entusiaster som synes det er veldig morsomt og spennende å bygge en egen flygende maskin hjemme, som til slutt 'lytter' og flyr til hvilken retning som helst brukeren foretrekker at den beveger seg.
For en ny spiller, som teknisk sett ikke er så informert, kan selv denne enkle maskinen være ekstremt komplisert å forstå, rett og slett fordi det meste av den relaterte informasjonen som presenteres på de mange nettstedene, ikke klarer å diskutere konseptet klart og på et 'språk' som kan passe en lekmann.
Denne artikkelen er spesielt skrevet for de ikke så tekniske menneskene som er interessert i å bygge en fantastisk flymaskin, men som finner emnet for vanskelig å fordøye.
Hvorfor quadcopters er så enkle å bygge i dag
Har du noen gang lurt på hvorfor quadcopters og droner er så enkle å konstruere i dagens verden og kanskje var umulig å bruke strøm tidligere?
Det er i utgangspunktet på grunn av utviklingen og forbedringen av Li-Ion-batteriene. Dette er en ekstremt effektiv form for batterier som er tilgjengelige i dag, og som gir imponerende kraft / vekt-forhold. Sammen med dette har oppfinnelsen av BLDC-motorer og høyt raffinerte permanentmagnetmotorer også bidratt til å gjøre dronene lett konstruerbare.
Li-Ion-batteriet er i stand til å gi utrolig mye rotasjonsmoment på motorene som blir tilstrekkelig nok til å skyve quadcopter-enheten til en høy høyde over bakken i løpet av sekunder, og lar den også forbli luftbåren i lang tid ytelsen veldig effektiv og nyttig.
Hvordan Quadcopter flyr
La oss nå hoppe riktig vei og forstå hva som er de viktigste tingene som kreves for å få en quadcopter til å fly. Her er det grunnleggende for å få maskinen til å fly jevnt:


1) I utgangspunktet krever maskinen en fast og sterk kropp, men ekstremt lett i vekt. Dette kan fremstilles eller monteres ved hjelp av hule kvadratiske aluminiumsekstruderingsrør ved å bore hull på passende måte og feste rammen med muttere og bolter.
2) Strukturen skal ha form av et perfekt '+' eller et perfekt 'x', det gjør ingen forskjell så lenge vinkelen mellom 'kryssende' rør er på 90 grader hver.

Grunnleggende elementer som trengs for å konstruere et quadcopter kan sees i følgende bilde:

Delmonteringssimulering
Den grove animerte simuleringen nedenfor viser hvordan du monterer de ovennevnte elementene sammen:

Hvordan konstruere Quadcopter Framework
Aluminiumet til '+' -rammen kan anskaffes ved å klippe og dimensjonere ferdigproduserte ekstruderingsrør av aluminium, som vist nedenfor:

Størrelsen på rammen er relativ og er derfor ikke avgjørende. Du kan bygge en bred ramme med motorene montert vidt fra hverandre eller bygge en ganske kompakt rammekonstruksjon der motorene ikke er for brede fra hverandre ... selv om det må sikres at propellene er langt borte fra hverandre for å gi bedre likevekt og balanse.
3) '+' rammestrukturen må være utstyrt med en firkantet plattform ved den sentrale delen der rammearmene møtes og krysser hverandre. Det kan bare være en godt polert aluminiumsplate som er passende dimensjonert for komfortabel innkvartering av all nødvendig elektronikk og ledninger.
Dermed er denne sentralplaten eller plattformen i utgangspunktet nødvendig for å installere og huse elektronikken til systemet som til slutt vil være ansvarlig for å kontrollere quadcopteret ditt.
4) Når rammeverket ovenfor er fullført, må motorene festes over endene av tverrstengene, som vist i figurene ovenfor.
5) Det er unødvendig å si at alt tilpasningsarbeidet må gjøres med største nøyaktighet og perfekt justering, dette kan kreve tilknytning til en erfaren fabrikant for jobben.
Siden alt i designet er parvis, vil det ikke være for vanskelig å justere elementene nøyaktig, det handler bare om å dimensjonere og montere parene med så mye likhet som mulig, noe som igjen vil sikre et maksimalt nivå av balanse, likevekt og synkronisering. for systemet.
Når rammeverket er bygget, er det på tide å integrere de elektroniske kretsene med de aktuelle motorene. Dette må gjøres i henhold til instruksjonene i den gitte kretsmanualen.
Kretskortene kan monteres på undersiden av sentralplaten med passende hus eller over platen, igjen med et passende skap for å omslutte det tett.

Forstå propellernes rotasjonsretning
Analyserer rotasjonsretningen til motorpropellene for en balansert løfting av:
Med henvisning til den animerte simuleringen ovenfor, bør motorens propellers rotasjonsretning justeres på følgende måte:
Det må rett og slett være slik at motorene i endene av den ene stangen skal være identiske, men forskjellige fra den andre stangmotorretningen, noe som betyr at hvis en stang har motorene spinnende med urviseren, så komplementerer motorene i endene av den andre stangen må være innstilt for å spinne mot klokken. retning.
Vennligst referer til simuleringen ovenfor for å forstå korrekt motvirkende bevegelse av motorene som kan være behov for å bli tildelt motorene for å sikre en balansert bruk av
Hvordan kontrollere retningen på quadcopteret ved å kontrollere motorens hastighet.
Ja, quadcopterets flyretning kan justeres og kontrolleres etter eget ønske og vilje ved å bare bruke forskjellige hastigheter (RPM) til de aktuelle motorene.
Følgende bilder viser hvordan den grunnleggende hastighetsoverføringen kan brukes på de aktuelle motorene for å oppnå og utføre ønsket flyretning til maskinen:




Som angitt i de ovennevnte diagrammer, ved å passende redusere hastigheten til et sett med motorer, eller øke hastigheten til det motsatte settet med motorer, eller justere hastighetene i henhold til deres egne preferanser, kan quadcopteret få til å reise i luften i hvilken som helst ønsket spesifikk retning.
Ovennevnte bilder indikerer de grunnleggende retningene, som forover, bakover, høyre, venstre osv ... men enhver annen merkelig retning kan også implementeres effektivt ved å justere hastigheten til de aktuelle motorene, eller kan være bare en enkelt motor.
For eksempel for å tvinge maskinen til å fly mot N / W-retningen, kan hastigheten til bare S / E-motoren økes, og for å gjøre det mulig for maskinen å fly i N / E-retningen, kan hastigheten til S / E W-motoren kan økes ... og så videre. Det trenger bare å bli praktisert til full kontroll av quadcopter blir oppnåelig og mestret av brukeren.
Designe en praktisk quadcopter
Så langt har vi lært om den grunnleggende konstruksjonen av dronekroppen og maskinvaren, la oss nå lære å lage et quadcopter eller en dronekrets raskt og billig ved hjelp av helt vanlige komponenter. I et av mine tidligere innlegg lærte vi hvordan vi lager en relativt kompleks og derfor effektiv quadcopter-flymaskin uten å bruke mikrokontroller. For mer info vil du gå gjennom følgende innlegg:
Fjernkontrollkrets uten MCU | Elektronisk krets
I denne artikkelen prøver vi å gjøre ovennevnte design mye enklere ved å eliminere børsteløse motorer og erstatte den med børstede motorer, og dermed gjøre det mulig å bli kvitt komplekset BLDC driverkretsmodul .
Siden de mekaniske konstruksjonsdetaljene til quadcopteret allerede er diskutert ovenfor, vil vi bare håndtere kretsdesigndelen og lære hvordan den kan bygges for å fly den foreslåtte enkleste dronekretsen.
Som nevnt tidligere krever denne enkle quadcopteren bare de grunnleggende RF-fjernkontrollmodulene som vist i eksemplet nedenfor:

Du må kjøp disse RF-modulene fra hvilken som helst nettbutikk eller fra din lokale elektroniske reserveforhandler:
Bortsett fra ovennevnte RF fjernkontrollmoduler Det vil også være behov for 4 børstede motorer med permanentmagnet, som faktisk danner hjertet til dronemaskinen. Det kan være som spesifisert i det følgende bildet med gitte beskrivelser, eller andre lignende i henhold til de nødvendige brukerspesifikasjonene:

Elektriske spesifikasjoner for motoren:
- 6V = driftsspenning (topp 12V)
- 200mA = driftsstrøm
- 10.000 = RPM
Deleliste
- 1K, 10K 1/4 watt = 1 hver
- 1uF / 25V kondensator = 1nr
- Forhåndsinnstilt 10K eller 5K = 1nr
- Rx = 5 watt trådbundet motstand, verdi som skal bekreftes med eksperimentering.
- IC 555 = 1nr
- 1N4148 Dioder = 2 nr
- IRF9540 Mosfet = 1nr
- 6V motorbørstet type = 4nos
- Fleksible ledninger, lodd, fluss etc.
- Generelt PCB for montering av ovennevnte deler
- 4-kanals RF-fjernkontrollmodul, som vist på de aktuelle bildene.
- Aluminiumskanaler, skruer, muttere, plater osv. Som forklart i artikkelen.
- Batteri som vist nedenfor:

Hvordan konfigurere fjernkontrollmottakeren med motorene
Før du forstår hvordan du konfigurerer fjernkontrollmottakeren med quadcoptermotorene, ville det være viktig å lære hvordan motorhastighetene skal justeres eller justeres for å generere de nødvendige bevegelsene til venstre, høyre, forover og bakover.
Primært er det to måter en quadcopter kan aktiveres for å bevege seg, som er i '+' og 'x'-modusene. I vårt design bruker vi den grunnleggende '+' bevegelsesmodus for dronen vår, som angitt i følgende diagram:

Med henvisning til diagrammet ovenfor innser vi at vi bare trenger å øke hastigheten til de aktuelle motorene på riktig måte for å utføre de ønskede retningsmanøvrene på dronen.
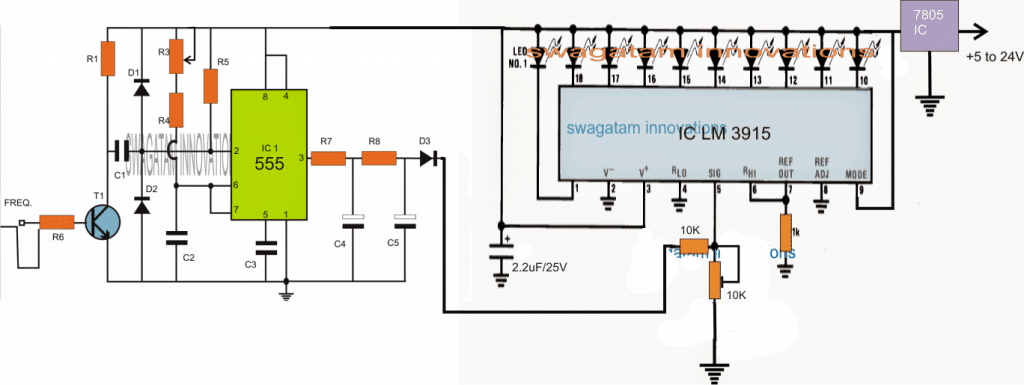
Denne hastighetsøkningen kan håndheves ved å konfigurere fjernkontrollreléene i henhold til følgende koblingsskjema. I diagrammet nedenfor kan vi se en IC 555 PWM-krets koblet til de 4 reléene til fjernkontrollmottakermodulen til de 6 reléene (1 relé er ubrukt og kan enkelt fjernes for å gi plass og vekt).
Justere PWM
Som det kan sees i diagrammet, er PWM-matingen koblet til alle N / C-kontaktene til reléene, noe som innebærer at quadcopter normalt vil sveve gjennom denne jevne og like PWM-matingen, hvis driftssyklus innledningsvis kan justeres slik at quadcopter er i stand til å oppnå en riktig spesifisert mengde skyvekraft og høyde.
Dette kan eksperimenteres ved å justere den viste PWM-potten på riktig måte.
Hvordan konfigurere relékontaktene
N / O-kontaktene til reléene kan sees direkte med den positive forsyningen, så når en relevant knapp trykkes på fjernsenderhåndsettet, aktiveres det tilsvarende reléet i mottakermodulen, som igjen gjør det mulig for den aktuelle motoren å få full 12V forsyning fra batteriet.
Ovennevnte operasjon tillater at den aktiverte motoren får større hastighet enn resten av motorene, som gjør at quadcopteret kan bevege seg mot den angitte retningen.
Så snart fjernkontrollknappen slippes, stopper dronen øyeblikkelig og fortsetter å sveve i konstant modus.
Identisk kan andre retningsbevegelser ganske enkelt oppnås ved å trykke på de andre tilordnede knappene på fjernkontrollen.
Det øverste reléet er for å sikre en sikker landing av maskinen, dette gjøres ved å legge til en strømfallsmotstand i serie med N / O-kontakten til det viste reléet.
Denne motstandsverdien må beregnes med noen eksperimenter slik at quadcopter svever rundt et par meter over bakken når denne motstanden byttes gjennom det vedlagte reléet.
Kretsdiagram

De viste reléene er den delen av RF-modulmottakeren, hvis kontakter i utgangspunktet ikke er koblet til (blankt som standard) og må kobles til som angitt i diagrammet ovenfor.
RF-fjernmottakeren skal være installert inne i quadcopteret og reléene er koblet til de aktuelle motorene og batteriet i henhold til ovennevnte layout.
Du kan se noen få kontakter (grønnfarget) som unødvendig kan legge vekt på dronen. Du kan fjerne dem alle for å redusere vekten, og koble de aktuelle ledningene direkte til PCB ved lodding.
Hvordan dronen beveger seg:
Som forklart i diskusjonen ovenfor, aktiverer den det tilsvarende reléet til quadcopter-modulen når en bestemt fjernkontrollknapp trykkes på, og får den aktuelle motoren til å bevege seg raskere.
Denne operasjonen tvinger i sin tur maskinen til å bevege seg i motsatt retning av motoren som blir slått for å rotere ved raskere turtall.
Dermed for eksempel å øke hastigheten på sørmotoren får maskinen til å bevege seg mot nord, øke nordmotoren får den til å bevege seg sørover, og på samme måte øker østmotorhastigheten at den beveger seg vestover og omvendt.
Interessant, å øke sør / øst motorene gjør det mulig for quadcopter å bevege seg mot det motsatte nord / vest som er i diagonal modus ... og så videre.
Fordeler og ulemper med den ovennevnte forklarte Simple Qaudcopter fjernkontrollkrets.
Fordeler
- Billig, og lett å bygge selv av en relativt ny hobbyist.
- Krever ikke komplekse styrespakoperasjoner.
- Kan styres ved hjelp av en enkelt 6-kanals fjernkontrollmodul
Ulemper
- Mindre effektiv når det gjelder batterisikkerhetskopiering på grunn av involvering av børstede motorer
- Retningshastigheten er konstant og kan ikke varieres gjennom fjernkontrollen
- Manøvrering er kanskje ikke jevn, men litt rykkete mens du bytter på knappene.
Forrige: Force Sensing Resistor Explained Neste: Kapasitiv spenningsdeler