EN Servo motor eller servo er en type elektrisk motor som brukes til å rotere maskindelene med høy presisjon. Denne motoren inkluderer en kontrollkrets som gir tilbakemelding på gjeldende plassering av motorakselen, slik at denne tilbakemeldingen ganske enkelt lar disse motorene rotere med høy presisjon. En servomotor er gunstig for å rotere et objekt i en viss avstand eller vinkel. Denne motoren er klassifisert i to typer AC servomotor og DC servomotor. Hvis en servomotor bruker likestrøm for å fungere, kalles motoren en DC-servomotor, mens hvis den fungerer med AC-strøm, er den kjent som en AC-servomotor. Denne opplæringen gir kort informasjon om DC servomotor – jobbe med applikasjoner.
Hva er DC-servomotor?
En servomotor som bruker DC elektrisk inngang for å produsere mekanisk utgang som posisjon, hastighet eller akselerasjon kalles en DC servomotor Vanligvis brukes disse typene motorer som drivkraft i numerisk kontrollerte maskiner, datamaskiner og mange flere uansett hvor start og stopp gjøres presist og veldig raskt.

DC servomotor konstruksjon og arbeid
DC-servomotoren er konstruert med forskjellige komponenter som er gitt i følgende blokkskjema. I dette diagrammet er hver komponent og dens funksjon diskutert nedenfor.

Motoren som brukes i dette er en typisk likestrømsmotor inkludert feltviklingen som er eksitert separat. Så avhengig av eksitasjonsnaturen, kan ytterligere kategoriseres som armaturstyrte og feltstyrte servomotorer.
Lasten som brukes i dette er en enkel vifte eller industriell last som ganske enkelt kobles til motorens mekaniske aksel.
Girkassen i denne konstruksjonen fungerer som en mekanisk svinger for å endre motorens utgang som akselerasjon, posisjon eller hastighet avhengig av applikasjonen.

En posisjonssensors hovedfunksjon er å få tilbakemeldingssignalet tilsvarende lastens nåværende posisjon. Generelt er dette et potensiometer som brukes til å gi en spenning som er proporsjonal med motorakselens absolutte vinkel gjennom girmekanismen.
Komparatorfunksjonen er å sammenligne o/p til en posisjonssensor og et referansepunkt for å produsere feilsignalet og gi det til forsterkeren. Hvis DC-motoren fungerer med presis kontroll, er det ingen feil. Posisjonssensoren, girkassen og komparatoren vil gjøre systemet til en lukket sløyfe.
Forsterkerfunksjonen er å forsterke feilen fra komparatoren og mate den til DC-motoren. Så den fungerer som en proporsjonal kontroller uansett hvor forsterkningen er styrket for null steady-state feil.
Det kontrollerte signalet gir inngangen til PWM (pulsbreddemodulator) avhengig av tilbakemeldingssignalet slik at det modulerer motorens inngang for presis kontroll ellers null steady-state feil. Videre bruker denne pulsbreddemodulatoren en referansebølgeform og komparator for å produsere pulser.
Ved å lage det lukkede sløyfesystemet oppnås akselerasjon, hastighet eller nøyaktig posisjon. Som navnet antyder, er servomotoren en kontrollert motor som gir den foretrukne utgangen på grunn av feedback- og kontrollereffekten. Feilsignalet blir ganske enkelt forsterket og brukt til å drive servomotoren. Avhengig av kontrollsignal- og pulsbreddemodulatorproduserende natur, har disse motorene overlegne kontrollerte metoder med FPGA-brikker eller digitale signalprosessorer.
Arbeidet til DC-servomotoren er; når inngangssignalet tilføres likestrømsmotoren, roterer den akselen og girene. Så i utgangspunktet føres rotasjonen av girutgangen tilbake til posisjonssensoren (potensiometer) hvis knotter dreier og endrer motstanden. Når motstanden endres, endres en spenning som er et feilsignal som mates inn i kontrolleren og følgelig genereres PWM.
For å vite mer om typene DC-servomotorer, se denne lenken: Ulike typer servomotorer .
Overføringsfunksjon til DC-servomotor
Overføringsfunksjonen kan defineres som forholdet mellom Laplace-transformasjonen (LT) av o/p-variabelen og LT ( Laplace transformasjon ) av i/p-variabelen. Generelt endrer DC-motoren energien fra elektrisk til mekanisk. Den tilførte elektriske energien ved ankerterminalene endres til kontrollert mekanisk energi.
Den armaturstyrte DC-servomotoroverføringsfunksjonen er vist nedenfor.

θ(s)/Va(s) = (K1/(Js2 + Bs)*(Las + Ra)) /1 + (K1KbKs)/(Js2 + Bs)*(Las+Ra)
Den feltstyrte DC-servomotoroverføringsfunksjonen er vist nedenfor.

θ(s)/Vf (s) = Kf / (sLf + Rf) * (s2J + Bs)
Den armaturstyrte likestrømsservomotoren gir overlegen ytelse på grunn av det lukkede sløyfesystemet sammenlignet med feltstyrt likestrømsservomotor som er det åpne sløyfesystemet. I tillegg er responshastigheten lav i feltkontrollsystemet. I armaturstyrt tilfelle er ankerets induktans ubetydelig, mens det i feltkontrolltilfellet ikke er det samme. Men i Infield-kontroll er forbedret demping ikke oppnåelig, mens det i armaturkontroll kan oppnås.
Spesifikasjoner
DC-servomotoren gir ytelsesspesifikasjoner som inkluderer følgende. Disse spesifikasjonene bør matches basert på belastningsbehovene til applikasjonen for å riktig dimensjonere en motor.
- Akselhastighet definerer ganske enkelt hastigheten ved hvilket punkt akselen dreier, uttrykt innenfor RPM (rotasjoner per minutt).
- Vanligvis er hastigheten som tilbys av produsenten tomgangshastigheten til o/p-akselen eller hastigheten der motorens utgangsmoment er null.
- Terminalspenning er designspenningen til motoren som bestemmer motorhastigheten. Denne hastigheten styres ganske enkelt ved å øke eller redusere den tilførte spenningen til motoren.
- Rotasjonskraften som dreiemoment genereres av akselen til DC-servomotoren. Så det nødvendige dreiemomentet for denne motoren bestemmes ganske enkelt av hastighet-momentkarakteristikkene til de forskjellige belastningene som oppleves innenfor målapplikasjonen. Disse dreiemomentene er to typer startmoment og kontinuerlig dreiemoment.
- Startmomentet er det nødvendige dreiemomentet ved start av servomotoren. Dette dreiemomentet er normalt høyere sammenlignet med kontinuerlig dreiemoment.
- Det kontinuerlige dreiemomentet er utgangsmomentet som er kapasiteten til motoren under konstante driftsforhold.
- Disse motorene må ha tilstrekkelig turtalls- og dreiemomentkapasitet for bruken, inkludert en margin på 20 til 30 % mellom belastningsbehovene samt motorklassifiseringer for å sikre pålitelighet. Når disse marginene overstiger for mye, vil kostnadseffektiviteten reduseres spesifikasjoner for 12V DC Coreless DC Servo Motor fra Faulhaber er:
- Girkasseforholdet er 64:l Planetarisk tre-trinns girkasse.
- Laststrømmen er 1400 mA strøm.
- Effekten er 17W.
- Hastigheten er 120 RPM.
- Ingen belastningsstrøm er 75mA.
- Encodertypen er optisk.
- Oppløsningen til koderen er 768CPR for O/P Shaft.
- Diameteren er 30 mm.
- Lengden er 42 mm.
- Total lengde er 85 mm.
- Skaftdiameteren er 6 mm.
- Skaftets lengde er 35 mm.
- Båsens dreiemoment er 52 kgcm.
Kjennetegn
De egenskapene til en DC servomotor Inkluder følgende.
- DC-servomotordesignet ligner på en permanent magnet eller separat begeistret likestrømsmotor.
- Denne motorens hastighetskontroll gjøres ved å kontrollere armaturspenningen.
- Servomotoren er designet med høy armaturmotstand.
- Det gir rask dreiemomentrespons.
- En trinnendring innenfor ankerspenningen genererer en rask endring i motorens hastighet.
AC-servomotor vs DC-servomotor
Forskjellen mellom en DC-servomotor og en AC-servomotor inkluderer følgende.
|
AC servomotor |
DC servomotor |
| En type servomotor som bruker AC elektrisk inngang for å generere mekanisk utgang kalles en AC servomotor. | En type servomotor som bruker DC elektrisk inngang for å generere mekanisk utgang kalles en DC servomotor. |
| AC servomotor gir lav utgangseffekt. | DC servomotor gir høy utgangseffekt. |
| Disse motorene er justerbare for høyhastighets driftsforhold. | Disse motorene er justerbare for driftsforhold med lav hastighet. |
| Disse typer motorer utvikler høyt dreiemoment. | Disse typer motorer utvikler lavt dreiemoment. |
| Driften av denne motoren er stabil, jevn og mindre støybasert. | Driften av denne motoren er mindre stabil og støyende. |
| Disse motorene har mindre effektivitet. | Disse motorene har høy effektivitet. |
| Disse motorene har færre stabilitetsproblemer. | Disse motorene har mer stabilitetsproblemer. |
| I disse motorene er det ingen elektronisk støyproblem. | I disse motorene er det et elektronisk støyproblem på grunn av tilstedeværelsen av børster. |
| Vedlikeholdet av disse motorene er mindre. | Vedlikeholdet av disse motorene er høyt på grunn av tilstedeværelsen av børster og kommutator. |
| Disse er lette og i små størrelser. | Disse er tunge og i stor størrelse. |
| Disse motorene er egnet for laveffektbaserte applikasjoner. | Disse motorene er egnet for høyeffektbaserte applikasjoner. |
DC servomotor grensesnitt med Arduino
For å kontrollere en DC-servomotor i en nøyaktig og nødvendig vinkel, kan et Arduino-kort/en hvilken som helst annen mikrokontroller brukes. Dette kortet har analog o/p som genererer et PWM-signal for å dreie servomotoren i en presis vinkel. Du kan også flytte vinkelposisjonen til servomotoren med et potensiometer eller trykknapper ved hjelp av en Arduino.
Servomotoren kan også styres med en IR-fjernkontroll som er lett tilgjengelig. Denne fjernkontrollen er nyttig for å flytte DC-servomotoren til en bestemt vinkel eller øke eller redusere vinkelen på motoren lineært med en IR-fjernkontroll.
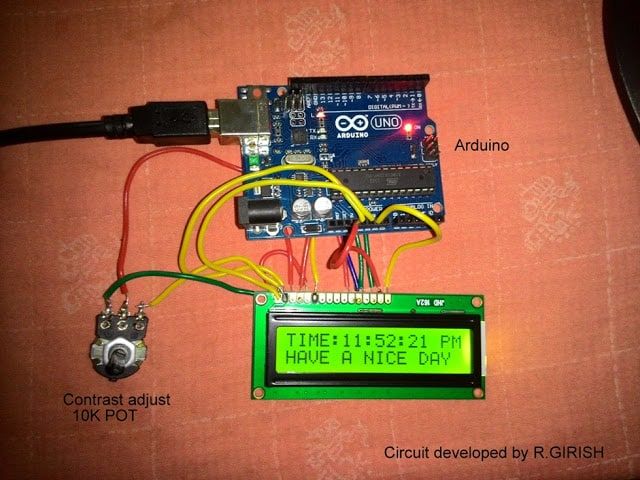
Her skal vi diskutere hvordan du flytter servomotoren ved å bruke en IR-fjernkontroll ved å bruke Arduino i en bestemt vinkel og også øke eller redusere vinkelen på servomotoren med fjernkontrollen med klokken og mot klokken. Grensesnittdiagrammet for DC-servomotoren med Arduino og IR-fjernkontroll er vist nedenfor. Forbindelsene til denne grensesnittet følger som;

Dette grensesnittet bruker hovedsakelig tre essensielle komponenter som DC-servomotor, Arduino-kort og TSOP1738 IR-sensor. Denne sensoren har tre terminaler som Vcc, GND og utgang. Vcc-terminalen til denne sensoren er koblet til 5V på Arduino Uno-kortet, GND-terminalen til denne sensoren er koblet til GND-terminalen på Arduino-kortet og utgangsterminalen er koblet til pinne 12 (digital inngang) på Arduino-kortet.
Digital utgangspinne 5 kobles ganske enkelt til signalinngangspinnen til servomotoren for å drive motoren
DC-servomotoren +ve-pinnen er gitt til den eksterne 5V-forsyningen og GND-pinnen til servomotoren er gitt til GND-pinnen til Arduino.
Jobber
IR-fjernkontrollen brukes til å utføre to handlinger 30 grader, 60 grader og 90 grader, og også for å øke/minske vinkelen på motoren fra 0 til 180 grader.
Fjernkontrollen inneholder mange knapper som sifferknapper (0-9), knapper for vinkelkontroll, piltastknapper, opp/ned-knapper osv. Når en sifferknapp fra 1 – 5 trykkes inn, vil likestrømsservomotoren bevege seg til den. nøyaktig vinkel og når vinkel opp/ned-knappen trykkes inn, kan vinkelen på motoren stilles inn nøyaktig til ±5 grader.
Når knappene er bestemt, må kodene til disse knappene dekodes. Når en knapp fra fjernkontrollen trykkes, vil den sende én kode for å utføre den nødvendige handlingen. For å dekode disse fjernkodene, brukes IR-fjernbiblioteket fra internett.
Last opp følgende program til Arduino og koble til IR-sensoren. Plasser nå fjernkontrollen mot IR-sensoren og trykk på knappen. Deretter åpner du den serielle monitoren og overvåker koden til knappen trykket i form av tall.
Arduino-kode
#include
#include
Tjenestetjeneste1;
int IRpin = 12; // pin for IR-sensoren
int motor_angle=0;
IRrecv irrecv(IRpin);
decode_results resultater;
ugyldig oppsett()
{
Serial.begin(9600); // initialisere seriell kommunikasjon
Serial.println(“IR fjernstyrt servomotor”); // vis melding
irrecv.enableIRIn(); // Start mottakeren
servo1.vedlegg(5); // erklære servomotor pin
servo1.write(motorvinkel); // flytt motoren til 0 grader
Serial.println(“Servomotorvinkel 0 grader”);
delay(2000);
}
void loop()
{
while(!(irrecv.decode(&resultater))); // vent til ingen knapp trykkes
if (irrecv.decode(&results)) // når knappen trykkes og koden mottas
{
if(results.value==2210) // sjekk om siffer 1-knappen er trykket
{
Serial.println(“servomotorvinkel 30 grader”);
motorvinkel = 30;
servo1.write(motorvinkel); // flytt motoren til 30 grader
}
else if(results.value==6308) // hvis siffer 2-knappen trykkes
{
Serial.println(“servomotorvinkel 60 grader”);
motor_angle = 60;
servo1.write(motorvinkel); // flytt motoren til 60 grader
}
else if(results.value==2215) // like wise for alle sifferknapper
{
Serial.println(“servomotorvinkel 90 grader”);
motor_angle = 90;
servo1.write(motorvinkel);
}
else if(results.value==6312)
{
Serial.println(“servomotorvinkel 120 grader”);
motor_angle = 120;
servo1.write(motorvinkel);
}
else if(results.value==2219)
{
Serial.println(“servomotorvinkel 150 grader”);
motor_angle = 150;
servo1.write(motorvinkel);
}
else if(results.value==6338) // hvis volum OPP-knappen trykkes
{
hvis(motorvinkel<150) motorvinkel+=5; // øke motorvinkelen
Serial.print(“Motorvinkel er “);
Serial.println(motor_angle);
servo1.write(motorvinkel); // og flytt motoren til den vinkelen
}
else if(results.value==6292) // hvis volum ned-knappen trykkes
{
hvis(motorvinkel>0) motorvinkel-=5; // redusere motorvinkel
Serial.print(“Motorvinkel er “);
Serial.println(motor_vinkel);
servo1.write(motor_vinkel); // og flytt motoren til den vinkelen
}
forsinkelse(200); // vent i 0,2 sek
irrecv.resume(); // igjen vær klar til å motta neste kode
}
}
Tilførselen til DC-servomotoren er gitt fra den eksterne 5V og forsyningen til IR-sensoren og Arduino-kortet er gitt fra USB. Når strøm er gitt til servomotoren, beveger den seg til 0 grader. Etter det vil meldingen vises som 'servomotorvinkel er 0 grader' på seriemonitoren.
Nå på fjernkontrollen, når knapp 1 er trykket, vil likestrømsservomotoren bevege seg 30 grader. På samme måte, når du trykker på knapper som 2, 3, 4 eller 5, vil motoren bevege seg med ønskede vinkler som 60 grader, 90 grader, 120 grader eller 150 grader. Nå vil seriemonitoren vise vinkelposisjonen til servomotoren som 'servomotorvinkel xx grader'
Når volum opp-knappen er trykket, vil vinkelen på motoren økes med 5 grader, noe som betyr at hvis den er 60 grader, vil den bevege seg til 65 grader. Så posisjonen til den nye vinkelen vil vises på den serielle skjermen.
På samme måte, når vinkel ned-knappen er trykket, vil vinkelen på motoren reduseres med 5 grader, noe som betyr at hvis vinkelen er 90 grader, vil den bevege seg til 85 grader. Signalet fra IR-fjernkontrollen registreres av IR-sensoren. Klikk for å vite hvordan den registrerer og hvordan IR-sensoren fungerer her
Så posisjonen til den nye vinkelen vil vises på den serielle skjermen. Derfor kan vi enkelt kontrollere vinkelen på DC-servomotoren med Arduino & IR-fjernkontroll.
For å vite hvordan du kobler likestrømsmotor med 8051 mikrokontroller klikk her
Fordeler med DC-servomotor
De fordelene med DC servomotorer Inkluder følgende.
- DC servomotordrift er stabil.
- Disse motorene har mye høyere utgangseffekt enn størrelsen og vekten på motoren.
- Når disse motorene kjører i høye hastigheter, genererer de ingen støy.
- Denne motoroperasjonen er vibrasjons- og resonansfri.
- Disse motortypene har høyt dreiemoment/treghetsforhold, og de kan ta opp belastninger veldig raskt.
- De har høy effektivitet.
- De gir raske svar.
- Disse er bærbare og lette.
- Driften av fire kvadranter er mulig.
- Ved høye hastigheter er disse hørbart stille.
De ulemper med DC servomotorer Inkluder følgende.
- Kjølemekanismen til DC-servomotoren er ineffektiv. Så denne motoren blir raskt forurenset når den er ventilert.
- Denne motoren genererer maksimal utgangseffekt ved høyere dreiemomenthastighet og trenger regelmessig giring.
- Disse motorene kan bli skadet av overbelastning.
- De har en kompleks design og trenger en koder.
- Disse motorene trenger tuning for å stabilisere tilbakemeldingssløyfen.
- Det krever vedlikehold.
DC-servomotorapplikasjoner
De bruksområder for DC-servomotorer Inkluder følgende.
- DC servomotorer brukes i verktøymaskiner for skjæring og forming av metall.
- Disse brukes til antenneplassering, trykking, pakking, trebearbeiding, tekstiler, produksjon av hyssing eller tau, CMM (koordinatmålemaskiner), håndtering av materialer, polering av gulv, åpning av dører, X-Y bord, medisinsk utstyr og waferspinning.
- Disse motorene brukes i flykontrollsystemer der plass- og vektbegrensninger krever at motorer leverer høy effekt for hvert enhetsvolum.
- Disse kan brukes der høyt startmoment er nødvendig, som vifter og vifter.
- Disse brukes også hovedsakelig til robotikk, programmeringsenheter, elektromekaniske aktuatorer, maskinverktøy, prosesskontrollere, etc.
Dermed er dette en oversikt over dc servomotor – fungerer med søknader. Disse servomotorene brukes i ulike bransjer for å gi løsningen på mange mekaniske bevegelser. Egenskapene til disse motorene vil gjøre dem svært effektive og kraftige. Her er et spørsmål til deg, hva er AC Servo Motor?