

Industriell automatisering og kontroll
Nå for tiden industrielle automatiseringssystemer har blitt populære i mange av bransjene og spiller en avgjørende rolle i å kontrollere flere prosessrelaterte operasjoner. På grunn av implementeringen av et bredt spekter av industrielle nettverk med deres geografiske fordeling over fabrikk eller industri, har overførings- og styringsegenskapene på gulvet blitt mer sofistikert og enkelt, alt fra lavt nivå til høyt nivåkontroll. Disse industrielle nettverkene blir dirigert gjennom forskjellige feltbusser som bruker forskjellige kommunikasjonsstandarder som CAN-protokoll, Profibus, Modbus, Device net osv. Så la oss se på hvordan CAN-kommunikasjon fungerer for å automatisere bransjene og andre automatiseringsbaserte systemer .
Introduksjon til industriell automatisering og kontroll
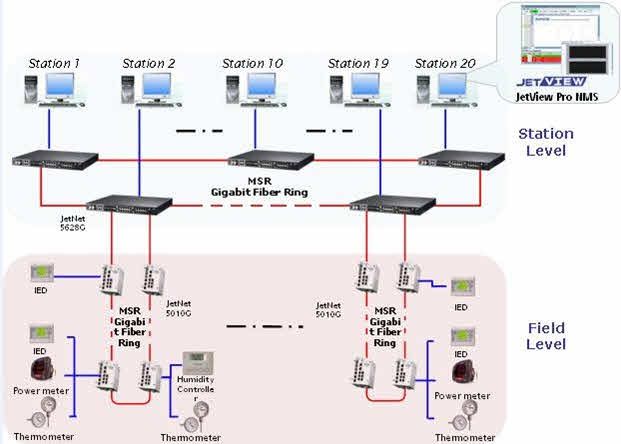
Figuren nedenfor viser arkitekturen for industriell automatisering og kontroll der tre nivåer av kontroll utføres for å automatisere hele systemet. Disse tre nivåene er kontroll og automatisering, prosesskontroll og høyere ordrekontroll. Kontroll- og automatiseringsnivået består av forskjellige feltapparater som sensorer og aktuatorer for å overvåke og kontrollere prosessvariablene.

Industriell automatiseringsarkitektur
Process Control Level er en sentral controller som er ansvarlig for å kontrollere og vedlikeholde flere kontrollerende enheter som Programmerbare logikkontrollere (PLCer) , og også brukergrafiske grensesnitt som SCADA og Human Machine Interface (HMI) er også inkludert i dette nivået. Kontrollnivået for høyere ordre er et foretaksnivå som styrer all forretningsrelatert virksomhet.
Ved å følge nøye med ovenstående diagram og hvert nivå og også mellomliggende nivåer, kan kommunikasjonsbussene som Profibus og industrielt Ethernet blir sett på som koblet til å utveksle informasjonen. Derfor er kommunikasjonsbussen den viktigste komponenten i industriell automatisering for pålitelig overføring av data mellom kontrollere, datamaskiner og også fra feltapparater.
Kontrollområdenettverk eller CAN-protokoll

OSI-modell (Open Systems Interconnection)
Datakommunikasjon er overføring av data fra ett punkt til et annet. For å støtte industriell kommunikasjon har International Organization for Standardization utviklet Open Systems Interconnection (OSI) -modell for å gi dataoverføring mellom forskjellige noder. Denne OSI-protokollen og rammeverket avhenger av produsenten. CAN-protokollen bruker nedre to lag, dvs. fysiske lag og datalinklag av de syv lagene i OSI-modellen.
Et Controller Area Network, eller CAN-protokoll er en multi-master seriell kommunikasjonsbuss , og det er et nettverk av uavhengige kontrollere. Den nåværende versjonen av CAN har vært i bruk siden 1990, og den ble utviklet av Bosch og Intel. Den sender meldinger til nodene som presenteres i et nettverk ved å tilby en overføringshastighet på opptil 1 Mbps. For en effektiv overføring følger den pålitelige feildeteksjonsmetoder - og for voldgift om meldingsprioritet og kollisjonsdeteksjon bruker den carrier sense multiple access protocol. På grunn av disse pålitelige dataoverføringsegenskapene har denne protokollen vært i bruk i busser, biler og andre bilsystemer, fabrikk- og industriell automatisering, gruvedrift, etc.
CAN-dataoverføring
CAN-protokoll er ikke en adressebasert protokoll, men en meldingsorientert protokoll, der den innebygde meldingen i CAN har innholdet og prioriteten til data som overføres. Opp ved mottak av data på bussen bestemmer hver node om de skal forkaste eller behandle dataene - og avhengig av systemet, er nettverksmeldingen bestemt til en enkelt node eller mange andre noder. CAN-kommunikasjon tillater en bestemt node å be om informasjon fra en hvilken som helst annen node ved å sende RTR (Remote Transmit Request).

CAN-protokoll dataoverføring
Den tilbyr automatisk voldgiftsfri overføring av data ved å overføre meldingen med høyest prioritet og sikkerhetskopiere og vente på meldingen med lavere prioritet. I denne protokollen er den dominerende en logisk 0, og den recessive er en logisk 1. Når en node overfører en recessiv bit og en annen overfører en dominerende bit, så vinner den dominerende biten. En prioritetsbasert voldgiftsordning avgjør om det vil bli gitt tillatelse til å fortsette overføringen hvis to eller flere enheter begynner å sende samtidig.
CAN Message Frame
Et CAN-kommunikasjonsnettverk kan konfigureres med forskjellige ramme- eller meldingsformater.
- Standard eller Base Frame Format eller CAN 2.0 A.
- Utvidet rammeformat eller CAN 2.0 B

Standard eller Base Frame Format eller CAN 2.0 A.
Forskjellen mellom disse to formatene er at lengden på bitene, dvs. baserammen støtter 11-bits lengde for identifikatoren, mens den utvidede rammen støtter 29-biters lengde for identifikatoren, som består av 18-bits utvidelse og en 11-biters identifikator. IDE-biten er forskjellig fra CAN-utvidet rammeformat og CAN-basisrammeformat der IDE overføres som dominerende i et 11-biters rammeverk og recessivt i et 29-biters rammeverk. Det er også mulig å sende eller motta meldinger i grunnrammeformat av noen CAN-kontrollere som støtter utvidede rammeformater.

Utvidet rammeformat eller CAN 2.0 B
CAN-protokollen har fire typer rammer: dataramme, ekstern ramme, feilramme og overbelastningsramme. Dataramme inneholder overføringsnode data fjernramme forespørsler om spesifikk identifikasjonsoverføringsfeilramme oppdager eventuelle nodefeil, og overbelastningsramme aktiveres når systemet injiserer forsinkelse mellom data eller ekstern ramme. CAN-kommunikasjon kan teoretisk lenke opptil 2032 enheter på et enkelt nettverk, men praktisk talt er det begrenset til 110 noder på grunn av maskinvaretransceivere. Den støtter kabling opp til 250 meter med overføringshastigheten på 250 Kbps med en bitrate på 10 Kbps er maksimal lengde på 1 km, og den korteste med 1 Mbps er 40 meter.
Industriell automatisering og kontroll ved bruk av CAN-protokoll
Dette prosjektet er implementert for å kontrollere industrien belastninger som kjøres av DC-motor basert på temperaturvariasjonene i prosessen. Diverse prosesskontrollsystemer er avhenger av temperaturen. Anta at i tilfelle en omrørerbeholder - etter å ha nådd en viss temperatur - må DC-motoren slås på for å rotere omrøreren. Så dette prosjektet oppnår dette med bruk av CAN-protokoll som er svært effektiv og pålitelig billig kommunikasjon.
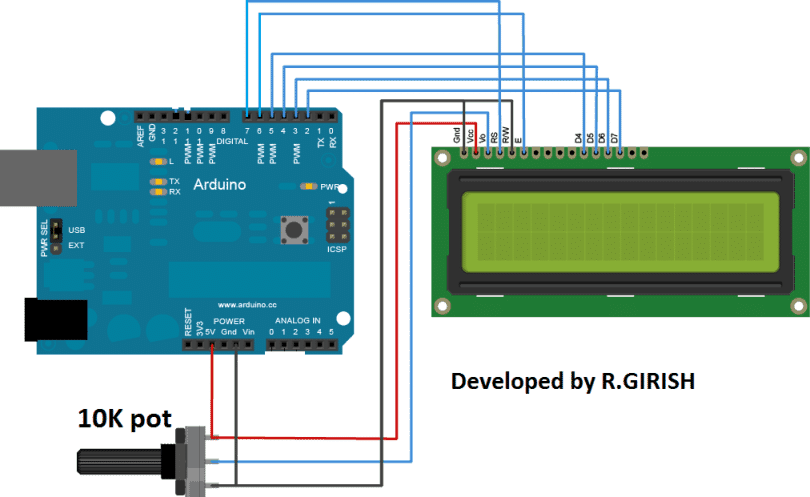
To mikrokontrollere brukes i dette prosjektet, en for å skaffe temperaturdata og den andre for kontrollere DC-motoren . CAN Controller MCP2515 og CAN transceiver MCP2551 er koblet til begge mikrokontrollere for å implementere CAN-kommunikasjon for utveksling av data.

Industriell automatisering og kontroll ved bruk av CAN-protokoll
Sende mikrokontroller overvåker kontinuerlig temperaturene ved bruk av LM35 temperatur sensor ved å konvertere analoge verdier til digitale med ADC festet til den. Disse verdiene sammenlignes med de angitte verdiene som er programmert i mikrokontrolleren, og disse verdiene brytes når mikrokontrolleren sender eller overfører dataene til mottakeren sidemikrokontroller av CAN-kontroller og transceiverenheter.
Mottaksiden CAN-kommunikasjon mottar dataene og overfører dem til mikrokontrolleren som videre behandler dataene og styrer DC-motoren av en IC-motordriver. Det er også mulig å endre retningen på motoren med driver IC styrt av mikrokontrolleren.
Dermed muliggjør CAN-protokollen peer-to-peer-kommunikasjon ved å koble forskjellige noder i industrielt miljø. Denne typen kommunikasjon kan også implementeres i andre automatiseringssystemer som hjemme eller bygning , fabrikk osv. Vi håper at denne artikkelen kan ha gitt deg en bedre forståelse av industriell automatisering med CAN-kommunikasjon. Vennligst skriv til oss for ytterligere informasjon og spørsmål.
Fotokreditter:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}