Denne allsidige børsteløse (BLDC) motorstyring IC er utstyrt for å kontrollere hvilken som helst ønsket høyspenning, høystrøm, hall-effekt sensor utstyrt 3-faset BLDC motor med ekstrem nøyaktighet og sikkerhet. La oss lære detaljene i dybden.

Bruke IC MC33035
Kretsens `` helt '' er enkeltchipkontrolleren MC33035, som er en høyytelses andre generasjons IC-modul, med alle nødvendige aktive funksjoner som kan være nødvendige for å kjøre mest høystrøm, høyspenning, 3-faset eller 4-faset BLDC motorer med åpen sløyfe eller lukket sløyfekonfigurasjon.

IC-en er utstyrt med en rotorposisjonsdekoder for å muliggjøre en nøyaktig kommuteringssekvensering, temperaturkompensert referanse for å muliggjøre riktig sensorspenning, en programmerbar frekvenssagtannoscillator, tre innebygde åpne kollektors høysides drivertrinn og tre høystrøms totempol type drivere med lav side, spesielt designet for å betjene et 3-faset H-bro med høy effekt mosfetmotorstyring.
Brikken er også forsterket internt med avanserte beskyttelsesfunksjoner, og idiotsikker kontrollfaser som spenning under spenning, syklus-for-syklus-strømbegrensning gjennom en mulighet for justerbar forsinkelsesavstengning, intern IC-høy temperaturavstenging og en eksklusivt utviklet feilutgang pinout som kan være grensesnittet med en MCU for foretrukket avansert prosessering og tilbakemelding.
Typiske funksjoner som kan utføres med denne ICen er, hastighetskontroll med åpen sløyfe, fremovervendt retningskontroll, 'kjør aktivering', en nøddynamisk bremsefunksjon.
IC er designet for å fungere med motorsensorer som har faser på 60 til 300 grader eller 120 til 240 grader, som en bonus IC kan også brukes til å kontrollere de tradisjonelle børstede motorene.
Hvordan IC fungerer
MC33035 er blant flere høyeffektive monolitiske DC børsteløse motorstyringer opprettet av Motorola .
Den består av omtrent alle muligheter som er nødvendige for å starte et fullverdig, åpen sløyfe, tre eller firefaset motorstyringssystem.
Videre kan kontrolleren oppnås for å kontrollere DC-børstemotorer. Designet med bipolar analog teknologi, har den et overlegen nivå av effektivitet og holdbarhet i hensynsløse industrielle omgivelser.
MC33035 har en rotorposisjonsdekoder for nøyaktig kommuteringssekvensering, et refusert miljø referanse som er kompetent til å levere en sensoreffekt, en frekvensprogrammerbar sagtannoscillator, en fullt tilgjengelig feilforsterker, en pulsbreddemodulator-komparator, 3 åpne kollektortopputganger og 3 høystrøm totempol nedre driverutganger akkurat for drift av MOSFET-er.
Innebygd i MC33035 er skjermingsfunksjoner som inkluderer underspennings-sperring, syklus − for − syklus strømbegrensning med en valgbar tidsforsinket låst avstengingsmodus, innebygd termisk avstengning, sammen med en eksklusiv feilutgang som praktisk vil være grensesnittet til en mikroprosessorkontroller.
Standard motorstyringsegenskaper inkluderer hastighetskontroll med åpen sløyfe, rotering forover eller bakover, kjøringsaktivering og dynamisk bremsing. På toppen av det har MC33035 en 60 ° / 120 ° valgpinne som konfigurerer rotorsituasjonsdekoderen for enten elektriske faseinnganger på 60 ° eller 120 ° sensor.

PIN OUT-funksjoner:
Pin1, 2, 24 (Bt, At, Ct) = Dette er de tre øvre stasjonsutgangene til IC-en som er spesifisert for å betjene eksternt konfigurerte kraftenheter som BJT. Disse pinouts er internt konfigurert som åpen samlermodus.
Pin # 3 (Fwd, Rev) = Denne pinout er ment å brukes til å kontrollere retningen på motorens rotasjon.
Pin # 4, 5, 6 (Sa, Sb, Sc) = Dette er 3 sensorutganger fra IC-en som er tilordnet til å styre styresekvensen til motoren.
Pin nr. 7 (utgang aktivert) = Denne pinnen på IC-en er tilordnet for å muliggjøre motordrift så lenge en høy logikk opprettholdes her, mens en lav logikk er for å muliggjøre en fristilling av motoren.
Pin # 8 (referanseutgang) = Denne pinnen er aktivert med en forsyningsstrøm for lading av oscillatorens tidskondensator Ct, samt gir et referansenivå for feilforsterkeren. Den kan også brukes til å levere strømforsyning til motorens Hall-effekt-sensor ICer.
Pin # 9 (gjeldende følsom ikke-inverterende inngang) : Signalutgangen på 100mV kan oppnås fra denne pinouten med referanse til pin nr. 15 og brukes til å avbryte ledningen for utgangsbryteren under en spesifisert oscillatorsyklus. Denne pinout kobles normalt sammen med oversiden av den nåværende følemotstanden.
Pin # 10 (oscillator) : Denne pinout bestemmer oscillatorfrekvensen for IC ved hjelp av RC-nettverket Rt og Ct.
Pin # 11 (feilforsterker ikke-inverterende inngang) : Denne pinout brukes med fartsreguleringspotensiometeret.
Pin # 12 (Feil forsterker inverterende inngang) : Denne pinnen er internt koblet opp til ovennevnte feilforsterkerutgang for å aktivere applikasjoner med åpen sløyfe .
Pin # 13 (Feilforsterkerutgang / PWM-inngang) : Funksjonen til denne pinout er å gi kompensasjon under lukkede applikasjoner.
Pin nr. 14 (feilutgang) : Denne feilindikatorutgangen kan bli en aktiv logisk lav under noen få kritiske forhold, for eksempel: Ugyldig inngangskode for sensoren, Aktiver pinout matet med null logikk, Pinout for gjeldende sensingang blir høyere enn 100mV (@ pin9 med referanse til pin15) , utløsing av spenningen, eller en situasjon med termisk avstengning).
Pin # 15 (Invertering av gjeldende sans) : Denne pinnen er innstilt for å gi referansenivået for den interne 100mV terskelen, og kan sees i sammenheng med den nedre sidestrømfølemotstanden.
Pin # 16 (GND) : Dette er bakken på IC-en og er beregnet på å gi bakkesignalet til kontrollkretsen og må refereres tilbake til strømkilden.
Pin nr. 17: (Vcc) : Dette er den positive forsyningspinnen som er spesifisert for å gi den positive spenningen til IC-kontrollkretsen. Minste driftsområde for denne stiften er 10V og maks ved 30V.
Pin # 18 (Vc) : Denne pinout angir høy tilstand (Voh) for de nedre stasjonens utganger gjennom kraften som tilskrives denne pin. Scenen fungerer i området 10 til 30V.
Pin # 19, 20, 21 (Cb, Bb, Ab) : Disse tre pinoutene er internt ordnet i form av totempolutganger og er tildelt til å drive de lavere enhetene.
Pin # 22 (60 D, 120D fase skift velg) : Statusen som tildeles denne pinouten, konfigurerer styringskretsoperasjonen med Hall-effektfølere for enten fasegangsinnganger på 60 grader (høy logikk) eller 120 grader (lav logikk).
Pin # 23 (brems) : En logikk som er lav ved denne pinouten, vil tillate at BLDC-motoren går jevnt, mens en logisk høy vil umiddelbart stoppe motoroperasjonen gjennom en rask retardasjon.
FUNKSJONELL BESKRIVELSE
Et representativt internt blokkskjema er vist i figuren ovenfor. En diskurs om fordelene og arbeidet med hver av de sentrale blokkene som er oppført nedenfor.
Rotorposisjons dekoder
En indre rotorposisjonsdekoder måler de 3 sensorinngangene (Pins 4, 5, 6) for å gjengi riktig sekvensering av de øvre og nedre pinoutene. Sensorinngangene er produsert for å grensesnitt rett med åpne kollektortypen Hall Effect-brytere eller optisk slissede koblinger.
Innebygde opptrekksmotstander er klassifisert for å begrense den nødvendige mengden eksterne deler. Inngangene er TTL-kompatible, med terskler karakteristisk på 2,2 V.
MC33035-serien av IC-er er ment å kontrollere 3-fasemotorer og kjøre med 4 av de mest populære konvensjonene innen sensorfasing. En 60 ° / 120 ° Select (Pin 22) leveres hensiktsmessig og gir MC33035 konfigurasjon på egenhånd for å regulere motorer som har enten 60 °, 120 °, 240 ° eller 300 ° elektrisk sensorfasing.
Med 3 sensorinnganger vil du oppdage 8 potensielle inngangskodedannelser, hvorav 6 er legitime rotorplasseringer.
De to andre kodene er utdaterte ettersom de generelt er et resultat av en åpen eller kortsluttet sensortilkobling.
Med 6 forsvarlige inngangskoder kan dekoderen muligens ta seg av motorrotorposisjonen innen et spektrum på 60 elektriske grader.
Forward / Reverse-inngangen (Pin 3) brukes som et verktøy for å endre løpet av motorplan ved å reversere spenningen over statorviklingen.
Så snart inngangen endrer tilstand, fra høy til lav ved bruk av en tildelt sensorinngangsprogramkode (for eksempel 100), byttes de lette topp- og basestasjonsutgangene som bruker samme alfastatus (AT til AB, BT til BB, CT til CB).
I hovedsak endres den skiftbare strengen retning og motoren reverserer retningssekvensen. Motor på / av-kontroll oppnås med Output Enable (Pin 7).
Når den ikke er koblet fra, tillater en intern 25 μA strømforsyning sekvensering av de ledende og basedrevutgangene. Når de er jordet, slås den øverste delen av stasjonens utganger av og basestasjonene blir presset til lave, noe som fremkaller motoren til kysten og feilutgangen for å utløse.
Dynamisk motorbremsing gjør det mulig å utvikle et overskudd av beskyttelsesmargin til den endelige enheten. Bremsesystem oppnås ved å sette din bremseinngang (pin 23) i høyere status.
Dette fører til at toppdrevutgangene slår seg av og undersiden driver for å aktivere, og kortslutter motorgenerert igjen EMF. Bremseinngangen har absolutt, helhjertet hensyn over alle andre innganger. Den indre 40 kΩ opptrekksmotstanden streeamlines grensesnitt ved hjelp av programmets sikkerhetsbryter ved å garantere aktivering av bremsen i tilfelle åpnet eller slått av.
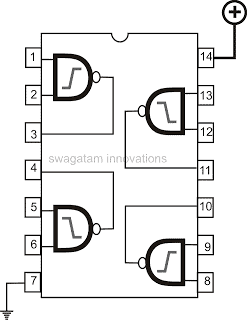
Sannhetstabellen for kommutasjonslogikk er vist nedenfor. En 4-inngangs-NOR-port brukes til å undersøke bremseinngangen og inngangene til de tre topp-utgangs-BJT-ene.

Målet er vanligvis å slå av bremsing før toppdrevutgangene oppnår høy status. Dette lar deg unngå synkronisert leasing av topp- og basestrømbryterne.
I halvbølgemotorprogrammer er det vanligvis ikke behov for toppkomponentene, og de holdes i de fleste tilfeller løsrevet. Under slike omstendigheter vil bremsing fremdeles oppnås fordi NOR-porten oppdager basespenningen til toppdrevutgangs-BJT-ene.
Feilforsterker
En forbedret effektivitet, fullt kompensert feilforsterker med aktiv tilgang til hver inngang og utgang (Pins # 11, 12, 13) tilbys for å hjelpe deg med å utføre hastighetskontroll med lukket sløyfe.
Forsterkeren leveres med en standard DC-spenningsforsterkning på 80 dB, 0,6 MHz forsterkningsbåndbredde, sammen med et bredt inngangsspenningsområde for vanlig modus som strekker seg fra bakken til Vref.
I de fleste åpne hastighetsreguleringsprogrammer med åpen sløyfe er forsterkeren satt opp som en enhetsforsterkningsspenningsfølger med den ikke-inverterende inngangen koblet til hastighetsinnstilt spenningsforsyning.
Oscillator Frekvensen til den indre rampeoscillatoren er hardt koblet gjennom verdiene som er bestemt for timingelementene RT og CT.
Kondensator CT vil bli ladet gjennom referanseutgangen (pin 8) ved hjelp av motstanden RT og ledes ut gjennom en indre utladningstransistor.
Rampetoppen og pit-spenningene er normalt 4,1 V og 1,5 V tilsvarende. For å tilby et anstendig skimp på hørbar støy og utgangsbryterytelse, foreslås en oscillatorfrekvens ved valg av 20 til 30 kHz. Henvis til figur 1 for valg av komponent.
Pulse Width Modulator
Den integrerte pulsbreddemodulasjonen gir en krafteffektiv tilnærming til å styre motorhastigheten ved å endre standardspenningen som tilskrives hver statorvikling gjennom kommuteringsserien.
Når CT utlades, modellerer oscillatoren hver sperre, noe som muliggjør ledning av de øvre og nedre stasjonene. PWM-komparatoren tilbakestiller topplåsen, og avslutter den nedre leasing av stasjonens utgang når den positive rampen til CT blir mer enn feilforsterkerutfallet.
Pulsbreddemodulatorens tidsdiagram er vist i figur 21.
Pulsbreddemodulering for hastighetsstyring presenterer seg eksklusivt ved de lavere drivutgangene. Strømgrense Konstant funksjon av en motor som kan være betydelig overbelastet, fører til overoppheting og uunngåelig funksjonsfeil.
Denne skadelige situasjonen kan lett best unngås sammen med bruken av strømbegrensning syklus − for − syklus.
Det vil si at hver syklus behandles som en uavhengig funksjon. Syklus-for-syklus strømbegrensning oppnås ved å spore statorstrømoppbyggingen hver gang en utgangsbryter utløser, og etter å ha registrert en høy strømsituasjon, umiddelbart slå av bryteren og holde den av i den utestående perioden med oscillatorrampeintervall.
Statorstrømmen transformeres til en spenning ved å påføre en jord-referert følemotstand RS (Figur 36) i tråd med de tre nedre delens brytertransistorer (Q4, Q5, Q6).
Spenningen som er etablert langs den forventende motstanden blir overvåket med gjeldende følsom inngang (pins 9 og 15), og sammenlignet med det indre 100 mV referansepunktet.
De nåværende sensorkomparatorinngangene kommer med et felles inngangsmodusområde på omtrent 3,0 V.
I tilfelle 100 mV nåværende sensortoleranse blir overgått, tilbakestiller komparatoren nedre senselås og avslutter ledning for utgangsbryteren. Verdien for den nåværende følemotstanden er faktisk:
Rs = 0,1 / Istator (maks)
Feilutgangen starter i en situasjon med høy forsterker. Dual-latch PWM-innstillingen sørger for at bare en enkelt utgangsutløserpuls oppstår i løpet av en bestemt oscillatorrutine, uansett om den er avsluttet ved hjelp av feilforsterkerens utgang eller den nåværende grensekomparatoren.
On-chip 6,25 V-regulatoren (Pin 8) tilbyr ladestrøm for oscillatortimingskondensatoren, et referansepunkt for feilforsterkeren, som gjør det mulig å levere 20 mA strøm som er egnet for spesifikt å drive sensorer i lavspenningsprogrammer.
I større spenningsformål kan dette bli viktig for å bytte strømmen fra regulatoren fra IC. Dette oppnås definitivt ved hjelp av en annen pass-transistor som vist i figur 22.
Et referansepunkt på 6,25 V så ut til å være bestemt for å muliggjøre gjengivelse av den enkle NPN-kretsen, uansett hvor Vref - VBE overgår den minimale spenningen som er nødvendig av Hall Effect-sensorer over varme.
Å ha riktig transistorsortiment og tilstrekkelig kjøleribbe, så mye som 1 amp laststrøm kan kjøpes.
Underspenning-Lockout
En treveis underspent sperring er integrert for å redusere skade på IC og de alternative strømbrytertransistorer. Under faktorer med lav strømforsyning, sørger det for at IC og sensorer er helt funksjonelle, og at det er tilstrekkelig utgangsspenning til basestasjonen.
De positive strømforsyningene til IC (VCC) og de lave stasjonene (VC) blir hver undersøkt av uavhengige komparatorer som får terskelverdiene til 9,1 V. Dette bestemte trinnet garanterer tilstrekkelig portpendling som kreves for å oppnå lav RDS (på) når du kjører vanlig strøm MOSFET utstyr.
Når Hall-sensorer aktiveres direkte fra referansen, vises upassende sensordrift i tilfelle referansepunktets utgangsspenning synker under 4,5 V.
En tredje komparator kan brukes til å gjenkjenne dette problemet.
Når mer enn en av komparatorene oppdager en underspenningssituasjon, blir Feilutgangen slått på, toppløpene blir satt av og basestasjonsutgangene er organisert i et lavt poeng.
Hver av komparatorene innlemmer hysterese for å beskytte mot amplituder når de skal bygge bro over deres individuelle terskler.
Feilutgang
Den åpne samlerens feilutgang (pin 14) hadde vært ment å tilby analysedetaljer i tilfelle en prosess sammenbrudd. Den har en vaskestrøm på 16 mA og kan spesifikt drive en lysdiode for synlig signal. Videre er det faktisk praktisk grensesnitt med TTL / CMOS-logikk for bruk i et mikroprosessorstyrt program.
Feilutgangen er effektiv lav mens mer enn en av de påfølgende situasjonene finner sted:
1) Ugyldige sensorinngangskoder
2) Utgang aktivert ved logikk [0]
3) Strømfølsom inngang mer enn 100 mV
4) Underspenningssperre, aktivering av 1 eller høyere av komparatorene
5) Varmeavstengning, optimal koblingstemperatur blir maksimal Denne eksklusive effekten kan også brukes til å skille mellom motorstart eller utholdt funksjon i en oversvømt situasjon.
Ved hjelp av et RC-nettverk blant feilutgangen og aktiveringsinngangen, betyr dette at du kan utvikle en tidsforsinket lukket avstengning med hensyn til overstrøm.
Ekstra kretsløp vist i figur 23 hjelper til med å gjøre enkel oppstart av motorsystemer som er utstyrt med høyere treghetsbelastning ved å gi ekstra opptaksmoment, mens du fortsatt beskytter overstrømsbeskyttelse. Denne oppgaven oppnås ved å plassere den nåværende begrensningen til neste verdi enn minimum for en etablert periode. I løpet av en ekstremt lang overstrømsituasjon vil kondensatoren CDLY lade, og fremkalle aktiveringsinngangen for å komme over toleransen til lav tilstand.
En sperre kan nå formes av den positive tilbakemeldingssyklusen fra Feilutgang til Utgangsaktivering. Når den er angitt av Current Sense Input, kan den bare tilbakestilles ved å kortslutte CDLY eller sykle strømforsyningene.
Fullt funksjonelt BLDC-skjema med høyt effekt
En fullt funksjonell BLDC-kontrollerkrets med høy effekt og høy strøm ved bruk av den forklarte enheten ovenfor, kan vises nedenfor, den er konfigurert som en fullbølge, 3-faset, 6-trinns modus:

Forrige: Beregning av spenning, strøm i en spoleinduktor Neste: Lag denne elektriske scooteren / Rickshaw Circuit