I dette innlegget skal vi utforske databladet til PIR eller Pyroelectric Infrared Radial Sensor HC-SR501. Vi vil forstå for hvilket formål PIR-sensor brukes? De grunnleggende utløseroperasjonene, pin-tilkoblingsdetaljer, tekniske spesifikasjoner, og til slutt vil vi se på noen virkelige applikasjoner.
Vi begynner med å forstå den faktiske PIR-sensorenheten som er installert inne standard PIR-moduler og lære dens interne egenskaper, pinout detaljer og interne arbeidsdetaljer.

Hva er en PIR-sensor?
PIR står for Pyroelectic Infrared Radial Sensor eller Passive Infrared Sensor. PIR er en elektronisk sensor som oppdager endringene i det infrarøde lyset over en viss avstand og gir ut et elektrisk signal ved utgangen som svar på et oppdaget IR-signal. Den kan oppdage ethvert infrarødt emitterende objekt som mennesker eller dyr hvis det er sensorens rekkevidde, eller beveger seg bort fra området, eller beveger seg innenfor sensorens område.
PIR-sensormodulen kan deles i to deler en infrarød følsom krystall og prosesseringskretsen.
Illustrasjon av PIR-sensitiv krystall:

Den mørke delen av metallet der den IR-følsomme krystallen er plassert, den følsomme krystallen kan oppdage nivået av infrarødt i omgivelsene. Den huser faktisk to pyroelektiske sensorer for å oppdage objekter i bevegelse. Hvis en av de følsomme krystallene oppdager endring i infrarød (inkrement eller dekrement) enn den andre sensitive krystall, blir utløsningen utløst.
En kuppelformet plaststruktur er normalt plassert over denne følsomme krystall som fungerer som en linse for å fokusere det infrarøde lyset på sensorene.
Hvordan PIR fungerer
Sensingoperasjonen til en pyroelektrisk infrarød sensor er basert på egenskapen eller karakteristikken som blir ansvarlig for å endre polarisasjonen av materialet som svar på temperaturendringer.
Disse sensorene bruker et dobbelt eller et par senselementer for å registrere IR-signalene i to trinn, noe som sikrer en idiotsikker deteksjon ved å avbryte de uønskede temperaturvariasjonene i det eksisterende EMI-trinnet. Denne to-trinns sensorprosessen forbedrer sensorens generelle stabilitet og hjelper bare med å oppdage IR-signaler fra menneskelig tilstedeværelse.
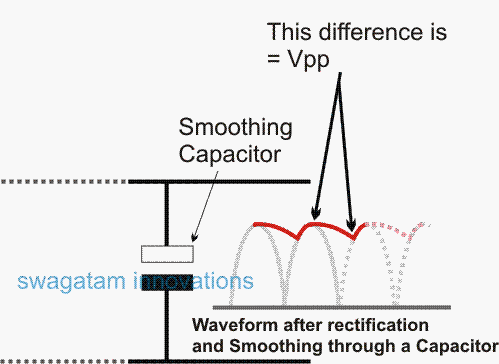
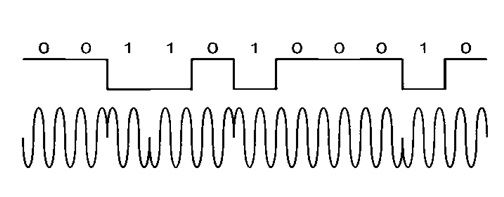
Når et menneske eller en relevant IR-kilde beveger seg forbi en PIR-sensor, kuttes strålingen inn i paret av føleelementer på en alternativ måte, og utløser utgangen for å generere et par PÅ / AV eller høye og lave pulser, som vist i følgende bølgeform:

Følgende grove Gif-simulering viser hvordan en PIR-sensor reagerer på et menneske i bevegelse og utvikler et par korte skarpe pulser over utgangsledningene for den nødvendige behandlingen eller utløser et riktig konfigurert reléstadium

Intern oppsett av en PIR
Følgende figur viser det interne oppsettet eller konfigurasjonen i en standard PIR-sensor.

Til venstre kan vi se et par IR-sensingelementer koblet i serie. Den øvre enden av denne serien er koblet til porten til en innebygd FET som fungerer som en liten IR-signalforsterker. Rg-trekkmotstanden gir den nødvendige standby-nulllogikken til FET for å sikre at den forblir helt AV i fravær av et IR-signal.
Når et bevegelig IR-signal blir oppdaget av paret av føleelementer, genererer det et tilsvarende par hi og lave logiske signaler som diskutert ovenfor:
Disse pulser forsterkes hensiktsmessig av FET og replikeres ved utgangstappen for videre behandling av et tilkoblet kretsløp.
De tilhørende EMI-trinnene sammen med kondensatoren gir ekstra filtrering til prosessen, for å produsere et rent sett med pulser ved den indikerte utgangspinnen til PIR.
Testing Oppsett for PIR-sensor
Følgende bilde viser en standard PIR-sensortestoppsett. Utgangen og Vss-pinnene (minuspinnen) til PIR er koblet til en ekstern nedtrekksmotstand, Vdd-pinnen leveres med en 5V-forsyning.

En svart skrivesaker genererer nødvendig ekvivalent infrarød stråling for PIR-sensoren gjennom en helikoptermekanisme. Chopperplaten kutter vekselvis IR-signalene som imiterer et bevegelig IR-mål.
Dette hakkede IR-signalet treffer PIR-sensoren som genererer de spesifiserte pulser over utgangspinnen, som passende forsterkes gjennom en opamp for analyse på et omfang.
De ideelle testbetingelsene for ovennevnte oppsett kan sees nedenfor:

Balansering av Sensing Element-utgangen
Siden det brukes en dobbel sensormekanisme i PIR-er, blir det nødvendig å sikre at behandlingen gjennom linseparet er riktig balansert.
Avkjenningselementene testes og konfigureres på passende måte ved å evaluere den respektive enkeltutgangsspenningen (SSOV) gjennom følgende formel:
Vekten: | Va - Vb | / (Va + Vb) x 100%
Hvor, Va = følsomhet for side A (mV topp til topp)
Vb = Følsomhetsside B (mV topp til topp)
Hovedspesifikasjoner
De viktigste tekniske spesifikasjonene og dimensjonsparametrene til en PIR-sensor kan læres av følgende detaljer:

Bruke PIR-moduler
I dag finner du PIR-moduler som har en PIR-sensor integrert med spesialiserte prosesseringskretser og linser. Dette forbedrer ytelsen til PIR mange bretter og gjør det mulig for sluttbrukeren å få veldefinert optimalisert, forsterket utgang fra modulen.
Denne utgangen trenger nå bare å konfigureres med et relétrinn for den nødvendige PÅ / AV-koblingen av en last som svar på menneskelig tilstedeværelse over den foreskrevne sonen.
Kretsen inne i standardmoduler består av IC BISS0001, som er spesielt designet for bevegelsesdeteksjonsapplikasjoner. To knapper er gitt, en for å justere følsomheten til modulen og en annen knott for å justere tidslengden for hvor lenge utgangen skal være HØY etter at modulen er utløst.

La oss nå undersøke de tekniske detaljene til PIR-sensoren HC-SR501.
Driftsspenning:
HC-SR501 er fra 5 V til 20 V, noe som gir stor fleksibilitet for kretsdesignere.
Nåværende forbruk:
HC-SR501 er en batterivennlig enhet, dens nåværende forbruk er 65 mA når den oppdager endringer i IR-lys.
Utgangsspenning:
Når modulen oppdager en bevegelse av infrarød, går utgangen HØY ved 3,3 V. Hvis modulen ikke oppdager bevegelse, går den LAV eller 0 V etter en fast periode.
Forsinkelsestid:
Det er utstyrt med en knott for å justere tiden for utgangen til å forbli HØY etter at IR har oppdaget. Dette er tidsperioden kan justeres fra 5 sekunder til 5 minutter.
Følsomhetsområde:
Vinkelen på deteksjonsområdet er rundt 110 graders kjegle. En knott er gitt for å justere følsomheten. Vi kan variere fra 3 meter til 7 meter vinkelrett på senor. Følsomheten reduseres når vi beveger begge sider av sensoren.
Driftstemperatur:
HC-SR501 har en imponerende driftstemperatur fra -15 til +70 grader Celsius.
Hvilestrøm:
Hvilestrømmen er strømmen som forbrukes fra forsyningen, når sensoren ikke oppdager noen bevegelse eller når den er i tomgang. Den bruker mindre enn 50 uA, noe som gjør sensoren batterivennlig.

PIR pinouts og trigger modus
Utløsermodus:
PIR-modulen har to utløsermodi: Enkel utløser / ikke-gjentakelsesmodus og gjentatt utløser. Disse to modusene kan nås ved å endre jumperposisjonen gitt i modulen.
Enkelt utløsermodus / ikke-repetisjonsmodus:
Når PIR-sensoren er satt i enkel utløsermodus (og tidtakerknappen / forsinkelsestiden er satt til 5 sekunder (si)), når et menneske blir oppdaget, blir utgangen HØY i 5 sekunder og blir LAV.
Gjenta utløsermodus:
Når PIR-sensoren er satt i gjentatt utløsermodus, når et menneske blir oppdaget, blir utgangen HØY, teller timeren i 5 sekunder, men når et annet menneske blir oppdaget med i løpet av de 5 sekundene, tilbakestilles timeren til null og teller ytterligere 5 sekunder etter andre menneske blir oppdaget.
Blokkeringstid:
Blokkeringstiden er tidsintervallet der sensoren er deaktivert eller ikke vil oppdage bevegelse. Blokkeringstiden for HC-
SR501 er som standard 3 sekunder.
Dette skjer etter at forsinkelsestiden (som ble stilt inn ved hjelp av tidtakerknappen), blir utgangen LAV i 3 sekunder i løpet av dette intervallet, vil ingen bevegelse bli oppdaget. Etter de 3 sekundene (LAV) vil sensoren være klar til å oppdage bevegelse igjen.
Med andre ord, når sensoren oppdager bevegelse, blir utgangen HØY, forblir utgangen HØY i henhold til tidsbryteren (si 5 sekunder), etter 5 sekunder blir PIR-sensoren LAV, LAVT signal forblir i 3 sekunder uavhengig av den nye bevegelse hvis noen.
Dimensjoner på modulen:
Sensoren er kompakt nok til å skjule seg fra folks syn slik at den ikke påvirker dekorasjoner osv. Den måler 32 mm x 24 mm.
Linsestørrelse:
Den hvite kuppelkonstruksjonen som lukker den pyroelektriske sensoren kalles Fresnel-linser, noe som øker deteksjonsområdet, og det ser ugjennomsiktig ut. Den måler 23 mm i diameter.
Applikasjoner:
• Sikkerhetssystemer.
• Automatiske lys.
• Industriell automatikkontroll.
• Automatiske dører.
Du kan finne noen av prosjektene ved hjelp av PIR-sensor på dette nettstedet.
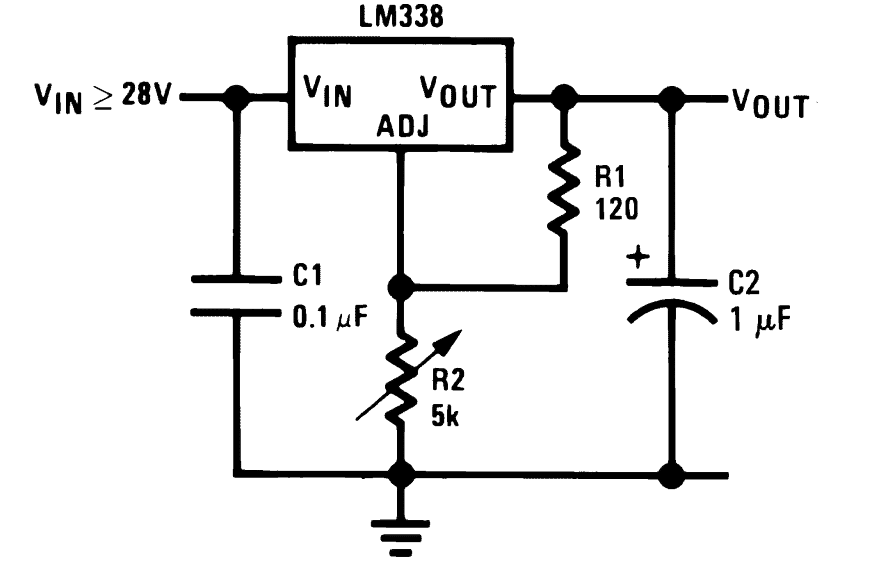
Typisk PIR-modulkrets
For entusiaster som har tenkt å bygge den komplette PIR-modulen sammen med sensoren og en fullverdig forsterker, kan følgende standardskjema brukes og brukes til enhver relevant PIR-sensorbasert applikasjonsutløsning.

Har du ytterligere tvil eller spørsmål? Du er velkommen til å legge dem frem gjennom kommentarfeltet nedenfor
Forrige: Arduino Full-Bridge (H-Bridge) inverterkrets Neste: Vehicle Speed Detector Circuit for Traffic Police