En kort introduksjon til en robot:
En robot er hvilken som helst maskin som er helt automatisk, dvs. den starter på egenhånd, bestemmer sin egen arbeidsmåte og stopper av seg selv. Det er faktisk en kopi av mennesket, som er designet for å lette menneskelig byrde. Den kan styres pneumatisk eller på hydrauliske måter eller ved hjelp av de enkle elektroniske styringsmåtene. Den første industriroboten var Unimates bygget av George Devol og Joe Engelberger på slutten av 50- og begynnelsen av 60-tallet.
Enhver robot er bygget på tre grunnleggende lover definert av den russiske science fiction-forfatteren Isaac Asimov:
- En robot skal ikke skade mennesket direkte eller indirekte.
- En robot bør adlyde menneskelige ordrer med mindre og til den bryter med den første loven.
- En robot bør beskytte sin egen eksistens forutsatt at de to første lovene ikke brytes.

En fast robot
Roboter kan være faste roboter eller mobile roboter. Mobile Robots er roboter med en mobil base som får roboten til å bevege seg fritt i miljøet. En av de avanserte mobilrobotene er Line Follower Robot. Det er i utgangspunktet en robot som følger en bestemt bane eller bane og bestemmer sin egen handlemåte som samhandler med hindring. Stien kan være en svart linje på det hvite gulvet (synlig) eller et magnetfelt (usynlig). Dens applikasjoner starter fra grunnleggende husholdningsbruk til industriell bruk, etc. Den nåværende tilstanden i industrien er at de bærer pakkene eller materialene ett sted til et annet sted ved bruk av kransystemet. Noen ganger kan løfting av store vekter på det tidspunktet føre til brudd på løftematerialer og vil også forårsake skade på pakkene. Linjen som følger roboter brukes ofte til å bære barn gjennom kjøpesentre, hjem, underholdningssteder, næringer. Bruken av linje som følger robotkjøretøy transporterer materialene fra ett sted til et annet sted i næringene. Denne robotbevegelsen avhenger helt av sporet. Roboten kan gjøre hva som helst du stiller dem til å gjøre. Som i fabrikker er alt de har å gjøre med å lage sine produkter å lage roboten.

En mobil robot
Linjefølgerrobot
En linjefølgerrobot er en robot som følger en bestemt bane som styres av en tilbakemeldingsmekanisme.
Bygg en grunnleggende linjefølgerrobot:
Å bygge en grunnleggende Line Follower-robot innebærer følgende trinn.
- Designe den mekaniske delen eller kroppen til roboten
- Definere kinematikken til robotene
- Designe kontrollen av roboten

En linjefølger-robot
Robotens mekaniske del eller kropp kan utformes ved hjelp av AutoCAD eller Workspace. En grunnleggende Line-følgerrobot kan bestå av en base i de to endene som hjulene er montert på. Et rektangulært ark av hard plast kan brukes som underlag. Videre kan et stivt legeme som en sylinder tilsettes sammen med andre formede legemer som er forbundet med hverandre ved skjøter, og hver med sin definerte bevegelse i spesiell retning. Line follower-roboten kan være en mobilrobot med hjul med en fast base, en legged mobilrobot med flere stive kropper sammenkoblet av ledd.
Det neste trinnet innebærer å definere robotens kinematikk. Kinematisk analyse av roboten innebærer en beskrivelse av bevegelsen i forhold til et fast koordinatsystem. Det er hovedsakelig opptatt av bevegelsen til roboten og med bevegelsen til hver kropp i tilfelle en legged robot. Det involverer generelt dynamikken i robotbevegelsen. Hele banen til roboten er satt ved hjelp av kinematisk analyse. Dette kan gjøres ved hjelp av Workspace-programvare.
Kontrollen av roboten er det viktigste aspektet ved arbeidet. Her refererer begrepet kontroll til robotens bevegelseskontroll, dvs. å kontrollere hjulenes bevegelse. En grunnleggende linjefølgerrobot følger en viss bane, og bevegelsen til roboten langs denne banen styres ved å kontrollere rotasjonen av hjulene, som er plassert på akslene til de to motorene. Så den grunnleggende kontrollen oppnås ved å kontrollere motorene. Kontrollkretsløpet innebærer bruk av sensorer for å fornemme banen og mikrokontrolleren eller en hvilken som helst annen enhet for å kontrollere motorens drift gjennom motordriverne, basert på sensorutgangen.
2 måter å kontrollere en linjefølgerrobot på
- Uten å bruke mikrokontrollere

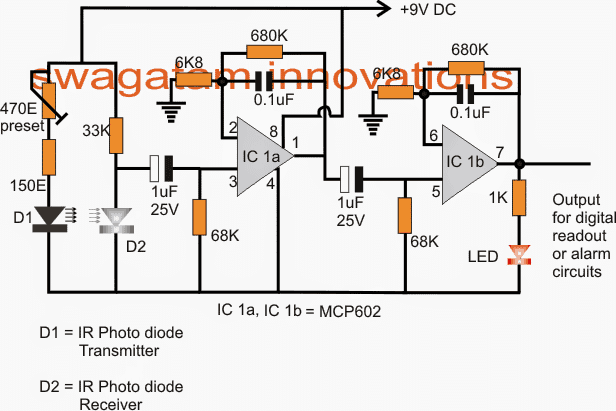
Blokkdiagram over kontrollsystemet
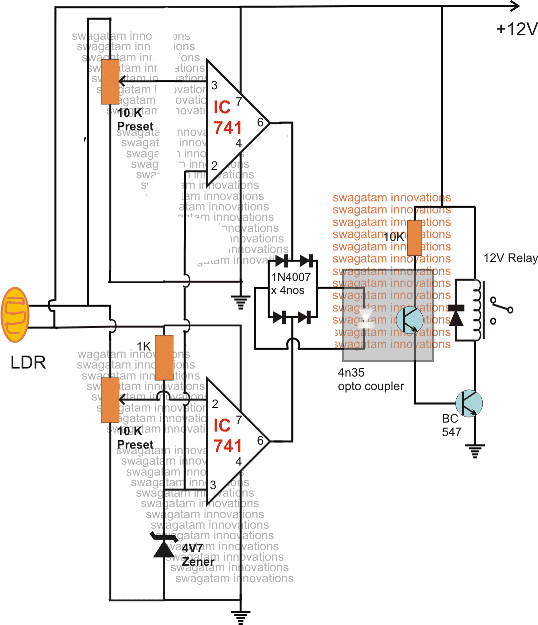
Den består av en IR-LED og fotodiodeordning for hver motor som styres ved å slå på og av transistoren.
IR-lysdioden for riktig forspenning avgir infrarødt lys. Dette IR-lyset reflekteres i tilfelle en hvit overflate, og det reflekterte IR-lyset faller inn på fotodioden. Motstanden til fotodioden avtar, noe som fører til en økning i strøm gjennom den og dermed spenningsfallet over den. Fotodioden er koblet til bunnen av transistoren, og som et resultat av økt spenning over fotodioden begynner transistoren å lede, og dermed får motoren som er koblet til transistorens kollektor nok strøm til å begynne å rotere. I tilfelle en svart farge på banen som en av sensorarrangementene møter, reflekteres ikke IR-lyset, og fotodioden gir mer motstand, noe som får transistoren til å stoppe ledningen og til slutt slutter motoren å rotere.
Dermed kan hele systemet styres ved hjelp av et enkelt LED-fotodiode-transistorarrangement.
- Med bruk av mikrokontrollere
Arbeidsprinsipp:
Linjebrakroboten er en av de selvdrivende robotene. Som oppdager og braker en linje tegnet på området. Linjen er indikert med hvit linje på en blokkflate eller blokklinje på en hvit overflate. Dette systemet må være sans for linjen. Dette programmet er avhengig av sensorene. Her bruker vi to sensorer for stigdeteksjonsformål. Det er nærhetssensor og IR-sensor. Nærhetssensoren som brukes til banedeteksjon og IR-sensoren som brukes til hindringsdeteksjon. Disse sensorene er montert i fronten av roboten. Mikrokontrolleren er en intelligent enhet, hele kretsen styres av mikrokontrolleren.

Blokkdiagram over linjen som følger robotkjøretøy med mikrokontroller
Ulike typer linjestyrte robotbiler:
Det er to typer linjestyrte robotkjøretøyer
- Mobilbasert linjekontrollert robotkjøretøy
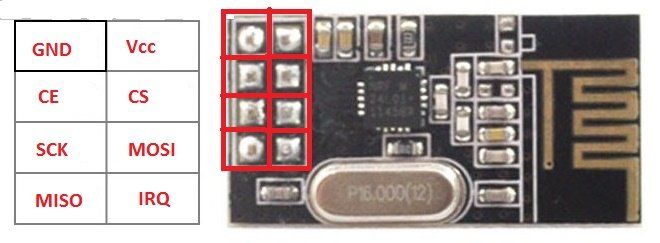
- RF-basert linjestyrt robotkjøretøy
Anvendelser av linjefølgerrobot:
- Industrielle applikasjoner : Disse robotene kan brukes som automatiserte utstyrsbærere i bransjer som erstatter tradisjonelle transportbånd.
- Bilapplikasjoner : Disse robotene kan også brukes som automatiske biler kjører på veier med innebygde magneter.
- Innenlandske applikasjoner : Disse kan også brukes hjemme til husholdningsformål som gulvrengjøring etc.
- Veiledningssøknader : Disse kan brukes på offentlige steder som kjøpesentre, museer osv. For å gi veiledning.
Fordeler:
- Robotbevegelse er automatisk
- Den brukes til langdistanse applikasjoner
- Enkelhet i bygningen
- Passer og glemmer systemet
- Brukes i hjemmet, industriell automatisering etc.