I dette prosjektet skal vi lære de grunnleggende spesifikasjonene til en servomotor og også hvordan man betjener en servomotor ved hjelp av en 555 timer IC, og et par trykknapper.
Av Ankit Negi
HVORFOR SERVO?
Servomotorer brukes i mange felt. Disse brukes hovedsakelig som aktuatorer i de områdene der vi trenger en presis bevegelse for å kontrollere utgangsbelastningen.
Beste eksempel er en RC-bil. La oss se at du vil ha bevegelse på 45 grader, ikke mer, ikke mindre. I så fall kan du ikke bruke en enkel DC-motor fordi den overskytter ønsket posisjon hver gang du slår den på.
Og dermed trenger vi en servomotor for å oppnå denne oppgaven, da den ikke bare vil gjøre en presis 45 graders rotasjon, men vil også stoppe jevnt i ønsket posisjon.

Få teknologiske poeng man må vite:
A) Før du kjøper eller bruker en servo, må du vite hva som er inne i den og hvordan den fungerer. en servomotor består av tre viktige komponenter:
1. En likestrømsmotor
2. 1 Potensiometer, enten analog eller digital
3. Kontrollkrets
B) Det er totalt 3 ledninger som kommer ut av en servomotor:
1. RØD: Til positiv forsyning
2. SVART: FOR negativ av forsyning
3. ORANGE ELLER GUL: Koblet til en referansespenning, dvs. en pwm-kilde
C) Servomotor kan rotere 90 grader i begge retninger, og dekker maksimalt 180 grader, dvs. 90 grader med klokken eller 90 grader mot klokken fra sin nøytrale posisjon.
For å rotere motoren med klokken, må klokkens puls være større enn 1,5 millisekunder, og for å rotere den mot klokken i tidsperioden må den være mindre enn 1,25 millisekunder, men frekvensen bør ligge mellom 50 og 60 Hertz.
Og dermed skal vi bruke en 555 timer til å generere slike klokkepulser for oss.
KOMPONENTER KREVES FOR DETTE PROSJEKTET:
1. SERVO MOTOR
to. 555 TIMER
3. 6 VOLTBATTERI
4. TO PUSH-KNAPPER
5. MOTSTAND: 1K, 4.7K, 33K, 10K, 68K, alt 1/4 watt 5%
6. EN TRANSISTOR (BC547)
7. TO KAPASITORER på 0.1uf
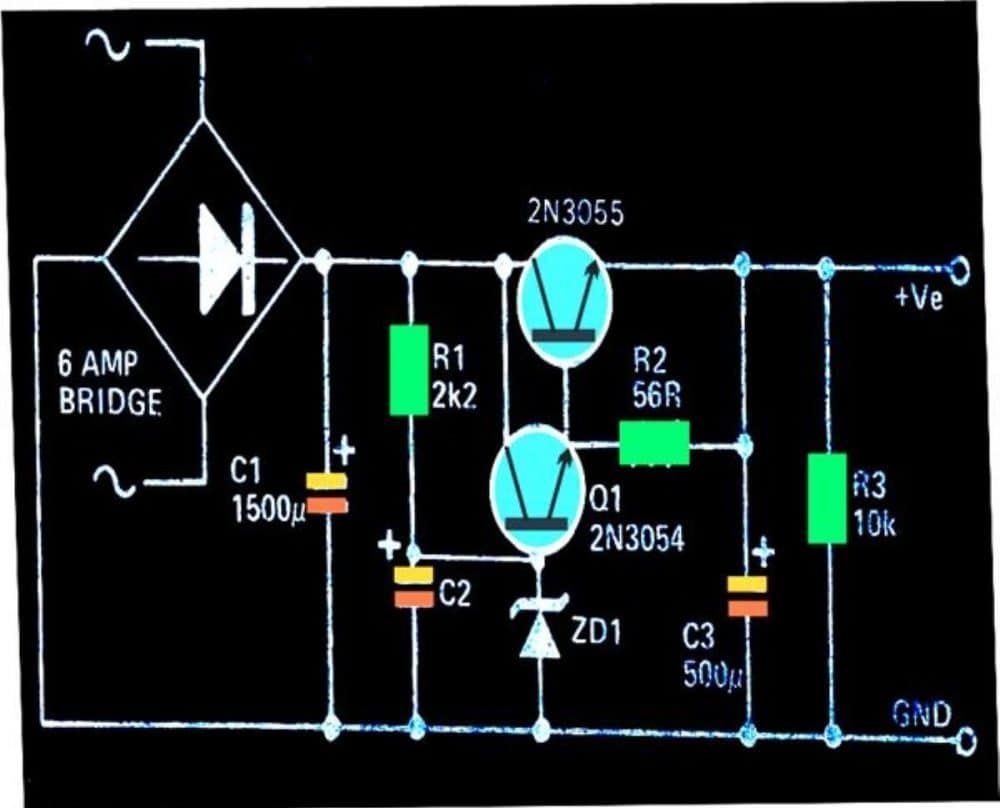
KRETSDIAGRAM VISER HVORDAN KJØRE EN SERVO MOTOR MED IC 555:

Opprett tilkoblinger som vist i det viste kretsskjemaet ovenfor.
Koble motorens positive og negative stift til henholdsvis den positive og negative terminalen på batteriet. Og koble signal eller referansepinne til transistorens kollektorterminal.
KRETS ARBEID:
1. Når trykk på knappen fremover trykkes-
Når dette tilfellet oppstår, blir 68 K motstand koblet mellom utladning og terskelstift. Nå er ikke kondensatoren opprinnelig ladet, så pin 2 er på 0 volt, som er mindre enn 1 av 3 av den påførte spenningen.
Dette tilbakestiller flip-flop inne i 555 og gir logikk 1 på utgangsterminalen som basen til transistoren er koblet til.
Dette får transistoren til å slå seg på og lede strøm direkte til bakken på grunn av hvilken signalpinne på motoren som får null volt da denne pinnen er direkte koblet til Collector-terminalen.
Siden kondensator begynner å lade når utgangen er 1, blir utgangen 0 så snart spenningen over kondensatoren blir større enn 2 av 3 av den påførte spenningen da den er direkte koblet til terskelstiftet.
Nå vil transistoren være av og signalpinnen vil få logikk 1.
På denne måten pwm-signaler genereres ved referansepinnen til motoren. Nå i dette tilfellet er tidsperioden for den genererte pulsen større enn 1,5 millisekunder, som du kan beregne med driftssyklusformelen for 555. Og dermed får vi 90 graders rotasjon med klokken av motoren som forklart i avsnittet ovenfor.
1. Når du trykker på bakover-knappen -
Når dette tilfellet oppstår, kobles 10 K motstand mellom utløp og terskelstift som er mindre enn 68 k ohm motstand. Dermed i dette tilfellet er pulsperioden leksjon enn 1,5 millisekunder, som du kan beregne med driftssyklusformelen for 555.
Nå genereres pwm ved referansepinnen til motoren på samme måte som i tilfellet ovenfor. Og dermed får vi 90 graders rotasjon mot uret som forklart i avsnitt ovenfor.
** i begge tilfeller er frekvensen mellom 40 og 60 hertz
Forrige: 2,4 GHz 10-kanals fjernkontrollbryter Neste: Kompakt 3-fase IGBT-driver IC STGIPN3H60 - datablad, pinout
![Bygg en enkel Buck Converter-krets [Step Down Converter]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)


![Punktkontaktdioder [Historikk, konstruksjon, applikasjonskrets]](https://electronics.jf-parede.pt/img/electronics-tutorial/38/point-contact-diodes-history-construction-application-circuit-1.jpg)