Denne robotarmkretsen som også kan implementeres som en robotkran, fungerer med 6 servomotorer og kan styres gjennom en fjernkontroll for mikrokontroller , ved hjelp av en Arduino-basert 2,4 GHz kommunikasjonslink.
Hovedtrekkene
Når du bygger noe så sofistikert som en robotarm, må den se moderne ut og må inneholde mange avanserte funksjoner, og ikke bare bare et leketøy som funksjoner.
Den foreslåtte fullverdige designen er relativt enkel å bygge, men den tilskrives noen avanserte manøvreringsfunksjoner som kan kontrolleres nøyaktig gjennom trådløse eller fjernstyrte kommandoer. Designet er til og med kompatibelt for industriell bruk, hvis motorene er passende oppgradert.
Hovedtrekkene i denne mekaniske kranen som robotarmen er:
- Kontinuerlig justerbar 'arm' over 180 grader vertikal akse.
- Kontinuerlig justerbar 'albue' over en 180 graders vertikal akse.
- Kontinuerlig justerbar 'fingerklype' eller grep over en 90 graders vertikal akse.
- Kontinuerlig justerbar 'arm' over et 180 graders horisontalt plan.
- Hele robotsystemet eller kranarmen er bevegelig og manøvrerbar som en fjernstyrt bil .
Grov arbeidssimulering
De få av funksjonene som er forklart ovenfor kan sees og forstås ved hjelp av følgende GIF-simulering:

Motor Mechanism Positions
Følgende figur gir oss et klart bilde av de forskjellige motorposisjonene og tilhørende girmekanismer som må installeres for å gjennomføre prosjektet:

I denne utformingen sørger vi for å holde ting så enkle som mulig slik at selv en lekmann er i stand til å forstå angående de involverte motor- / girmekanismene. og ingenting forblir skjult bak komplekse mekanismer.
Arbeidet eller funksjonen til hver motor kan forstås ved hjelp av følgende punkter:
- Motor nr. 1 styrer 'fingerklypen' eller gripesystemet til roboten. Det bevegelige elementet er direkte hengslet med motorakselen for bevegelsene.
- Motor nr. 2 styrer systemets albuemekanisme. Det er konfigurert med et enkelt gir-til-gir-system for implementering av løftebevegelsen.
- Motor # 3 er ansvarlig for å løfte hele robotarmsystemet vertikalt, derfor må denne motoren være kraftigere enn de to ovenfor. Denne motoren er også integrert ved hjelp av girmekanisme for å levere de nødvendige handlingene.
- Motor nr. 4 styrer hele kranmekanismen over et 360 graders horisontalt plan, slik at armen er i stand til å plukke eller løfte et hvilket som helst objekt i hele med eller mot klokken radialt område.
- Motor nr. 5 og 6 fungerer som hjul for plattformen som bærer hele systemet. Disse motorene kan styres ved å flytte systemet fra ett sted til et annet uten problemer, og det letter også øst / vest, nord / sør bevegelse av systemet ganske enkelt ved å justere hastighetene til venstre / høyre motorer. Dette gjøres ganske enkelt ved å redusere eller stoppe en av de to motorene, for eksempel for å initiere en høyre sidesving, kan høyre motor stoppes eller stoppes til svingen er fullført eller til ønsket vinkel. På samme måte gjør du det samme med venstre motor for å starte en venstresving.
Bakhjulet har ingen motor tilknyttet, det er hengslet for å bevege seg fritt på sin sentrale akse og følge forhjulets manøvrer.
Den trådløse mottakerkretsen
Siden hele systemet er designet for å fungere med en fjernkontroll, må en trådløs mottaker konfigureres med de ovennevnte motorene. Og dette kan gjøres ved hjelp av følgende Arduino-baserte krets.

Som du kan se, er det 6 servomotorer festet med Arduino-utgangene, og hver av disse styres gjennom de fjernstyrte signalene fanget av den tilkoblede sensoren NRF24L01.
Signalene behandles av denne sensoren og mates til Arduino som leverer behandlingen til den aktuelle motoren for de tiltenkte hastighetskontrolloperasjonene.
Signaler sendes fra en senderkrets med potensiometre. Justeringen på dette potensiometeret styrer hastighetsnivåene på de korresponderende motorene festet med den ovenfor forklarte mottakerkretsen.
La oss nå se hvordan senderkretsen ser ut:
Sendermodul

Senderdesignet kan sees med 6 potensiometer festet med Arduino-kortet og også med en annen 2,4 GHz-kommunikasjonslink-enhet.
Hver av pottene er programmert for kontrollere en tilsvarende motor tilknyttet mottakerkretsen. Derfor når brukeren roterer akselen til et valgt potensiometer på senderen, begynner den tilsvarende motoren til robotarmen å bevege seg og implementere handlingene avhengig av dens spesifikke posisjon på systemet.
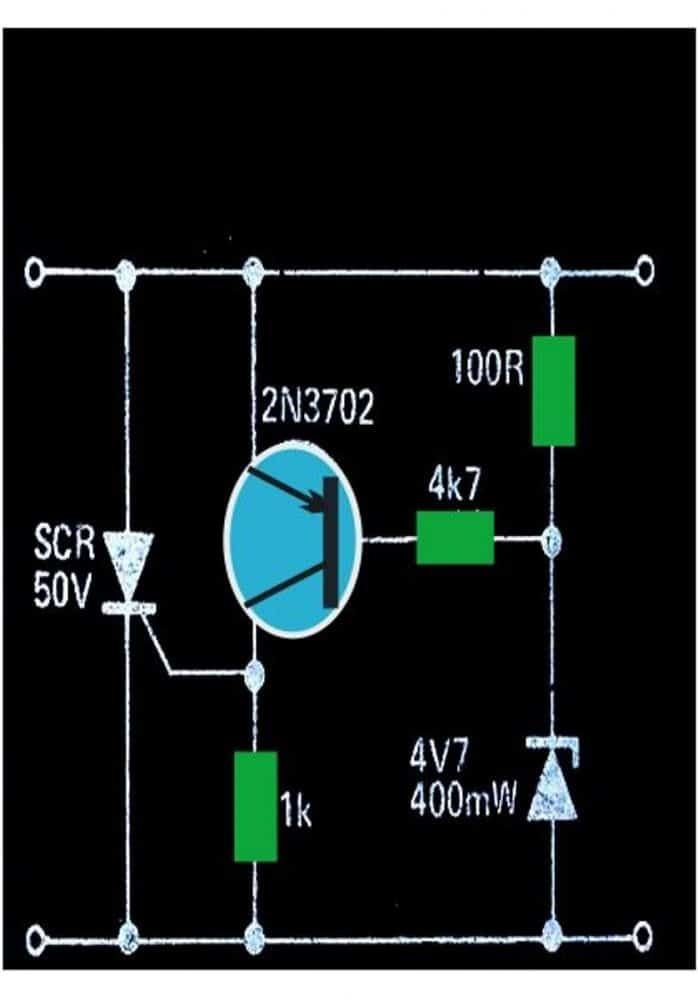
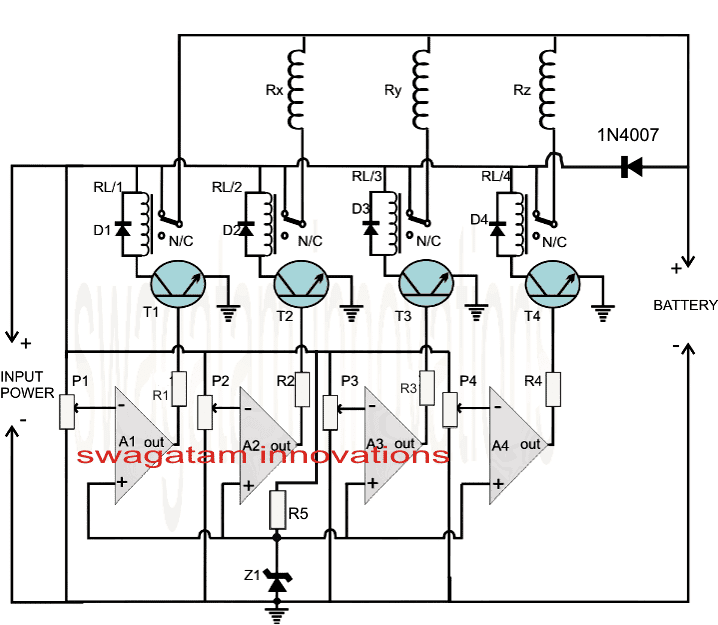
Kontrollerer motoroverbelastning
Du lurer kanskje på hvordan motorene begrenser bevegelsen over de bevegelige områdene, siden systemet ikke har noen begrensende ordning for å forhindre at motoren overbelastes når de respektive mekanismebevegelsene når sine mål.
Betyr, for eksempel hva som skjer hvis motoren ikke stoppes selv etter at 'grepet' har holdt objektet tett?
Den enkleste løsningen på dette er å legge til individ nåværende kontrollmoduler med hver av motorene slik at motoren i slike situasjoner forblir slått PÅ og låst uten å brenne eller overbelaste.
På grunn av en aktiv strømkontroll, går ikke motorene gjennom overbelastning eller overstrømsforhold, og de fortsetter å operere innenfor et spesifisert sikkert område.
Komplett programkode kan bli funnet i denne artikkelen
Forrige: USB 5V lydforsterker for PC-høyttalere Neste: 7 modifiserte sinusbølgeomformerkretser utforsket - 100W til 3kVA