Roboter kan brukes i mange applikasjoner i næringer, militære, innenlandske. En av de viktigste bruksområdene til roboter er en ressurs for mennesker. Enten det er noen form for farlige situasjoner som en brann som bryter ut eller et sted fullt av landminer, kan roboter lett finne en vei ut av disse problemene. Så la oss se disse to typene roboter - en landminnesensorrobot og en brannslukkingsrobot
Land Mine Sensing Robot
Hvordan fornemme landgruve med roboter?
En av de viktigste applikasjonene til Robotics er i forsvar. En robot i militæret er et fjernstyrt kjøretøy med mange unike funksjoner. Det kan være et robotkjøretøy med et kamera å spionere, et robotkjøretøy med en LASER-pistol for å oppdage og ødelegge mål, eller en robot med en metalldetektor for å oppdage tilstedeværelsen av landminer.
En av de tradisjonelle og konvensjonelle måtene for gruvedeteksjon er bruk av trente kontaktannonser som manuelt søker etter metaller eller gruver ved hjelp av en metalldetektor. Dette er imidlertid usikkert og dyrt og også tregt.
For å løse dette problemet foretrekkes et langt mer avansert system.
Et par måter å oppdage landminer på:
- Ved hjelp av en robot som kan sette en sonde i bakken som kan oppdage gjenstandene under jorden og bestemme materialtypen.
- Ved hjelp av en robot med en metalldetektor som kan føle tilstedeværelsen av ledende elementer som landminer og alarmere brukeren.
Før vi går nærmere inn på detaljer om den andre typen - dvs. roboten med en metalldetektor, kan vi få en kort tilbakekalling av de to viktige begrepene - Land Mines og Metal Detector.
TIL Land min er en eksplosiv enhet som bevisst er plassert under bakken og eksploderer når den utløses av trykk. I følge en statistisk rapport er det rundt 100 millioner landminer i 70 land over hele verden. En landmine en gang plassert kan fungere i opptil 50 år. Er det ikke farlig !!

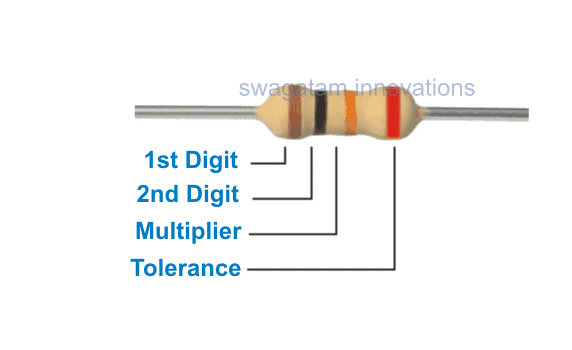
En grunnleggende metalldetektor fungerer på prinsippet om faradays induksjonslov. Den består av en spole som får energi til å utvikle et pulserende magnetfelt rundt den. Når spolen kommer i nærheten av et ledende element som metall (en gruve), induseres en elektrisk strøm (virvelstrøm) i den. Den induserte virvelstrømmen forårsaker utvikling av elektromagnetisk felt rundt metallet, som overføres til spolen som utvikler et elektrisk signal som analyseres. Større er avstanden mellom spolen og metallet, svakere er magnetfeltet.
En enkel prototype:

En enkel prototype av robotkjøretøy med metalldetektor
Designe roboten:
Robotbilen består av følgende enheter:
- En rektangulær base for å støtte hele robotstrukturen, festet med to hjul for bevegelse.
- Et par DC-motorer for å gi den nødvendige bevegelsen til roboten.
- En kontrollenhet som består av en RF-mottaker som mottar kommandosignaler fra en senderenhet for å kontrollere motordriveren og kontrollere motorene deretter.
- En metalldetektor krets sammen med en alarm alarm utløses når metallet oppdages.
Hvordan fungerer roboten:
Metaldetektorkretsen innebygd i robotstyringskretsene består av en transistor som drives av en innstilt oscillatorkrets som består av spolen. Når et metall oppdages og den elektriske strømmen overføres gjennom spolen, er transistoren 1 i stand og driver en annen transistor2 til av-tilstanden. Denne transistoren3 driver igjen en annen transistor til av-tilstanden. Denne spesielle transistoren 3 er koblet til en annen transistor 4 som er koblet slik at den er i tilstand når drivertransistoren 3 er i av-tilstand. Transistoren 4 er koblet sammen slik at summeren og LED-en får riktig forspenning og begynner å lede.

Blokkdiagram over metaldetektorenhet
LED-lampen begynner å lyse og summeren begynner å ringe. Når et metall blir oppdaget, vil alarmen begynne å ringe og LED-lampen vil lyse.
Styring av roboten:
Den enkle prototypen kan styres ved hjelp av RF-kommunikasjon, som er et kortdistansekommunikasjonssystem. Kommandoene overføres ved hjelp av en sender og mottas av en mottaker innebygd i robotkretsen for å kontrollere robotbevegelsen.

Blokkdiagram for senderseksjonen
Senderen består av et sett med trykknapper som fremover, bakover, stopp, venstre og høyre som trykkes for å gi robotens bevegelse i ønsket retning. Trykknappene er koblet til inngangsporten til mikrokontrolleren. Ved mottak av disse signalene utvikler mikrokontrolleren et tilsvarende 4-bits signal i parallell form over en annen I / O-port, som en koder IC er koblet til. Koderen konverterer disse signalene til en seriell form for data. RF-senderen modulerer disse serielle dataene, som overføres gjennom antennen.

Blokkdiagram over mottakerseksjonen
Mottakerseksjonen montert på roboten består av RF-mottakeren som demodulerer dette signalet. Dekoderen IC mottar dette signalet i seriell form og utvikler en tilsvarende 4-bits parallell data ved utgangen. Mikrokontrolleren mottar disse dataene og gir følgelig et styresignal til motordriveren IC LM293D, som driver begge motorene.
Brannslukkende robotkjøretøy:
Konseptet av brannbekjempelse robotkjøretøy kjemper i brann. De siste årene har det vært flere alvorlige ulykker, inkludert brann- og bombeeksplosjoner. Vi har kjent om store brannulykker som kjernekraftverk, petroleum, bensintank og kjemiske fabrikker, store brannindustrielle selskaper på disse stedene en gang startet brannen, kan føre til at det er veldig alvorlig. Tusenvis av mennesker har dødd i denne forekomsten. Det er en brannslukking robotkjøretøy teknologi. Dette robotkjøretøyet pleide å finne brannen og kjempe for brannene.

Brannslukkende robotkjøretøy
Arbeidsprinsipp for brannslukkende robotkjøretøy:
Robotbilen lastet med vanntank. Pumpen styres av trådløs kommunikasjon (RF og mobil kommunikasjon). Senderen er koblet til trykknappene. Ved å bruke denne trykknappen sendes kommandoer til mottakeren og kontrollmomentet til den robotlignende fremover, bakover, venstre, høyre. Mottaksenden tre motorer er koblet til mikrokontrolleren.

Senderblokkdiagram

Mottakerblokkdiagram
RF-sender fungerer som RF-fjernkontroll der rekkevidden er 200 meter. I hjemmet, kontorer og næringer oppbevares brannsensorene på visse steder når det oppstår brann i nærheten av en brannsensor. Sensorene er en følelse av at den tilsvarende biten overføres til RF-mottakeren. RF-mottakeren er integrert med en mikrokontroller. Når RF-mottakeren mottar signalene om at informasjonen overføres til mikrokontrolleren, beveger roboten seg mot brannsensorer. Sensorenes plasseringer er lagret i mikrokontrolleren. Når roboten når ønsket sted, stopper roboten og aktiverer sprøyten til den brannen. Etter avfyringen går roboten til utgangsposisjonen. Hele kretsen styres av mikrokontrolleren.
Typer av brannslukkende robotkjøretøy:
Hjem Brannslukking Robotkjøretøy :
Feltaksjonen er begrenset til den nåværende Flore of house. Denne roboten bruker mange husholdningsartikler for å ta fyr når noen sover eller er borte. Denne roboten brukes til å sikre hjemmet, og ved hjelp av dette programmet åpnes alle dører i Flore fordi dette kjøretøyet flytter et sted til et annet sted i hjemmet. Brannslokkingsområdet må være trygt for ikke å forårsake en ny ulykke. Den ekstra funksjonen til denne roboten er å operere på lang avstand.
Industriell brannslukking:
De fleste næringer står overfor brannulykker som gass, bensin, kjernekraftverk, kjemisk industri og enorme mengder skade, og flere mennesker er døde i nærheten av omkringliggende områder. Denne roboten har styrken til å bære ild rundt i det brennende området for å levere ubegrenset vann. Brann forårsaker senket sikt, ekstrem varme og mange flere situasjoner som kan føre til skader.
Skogbrannslukking:
Skogbranner er veldig farlig. Det kan være kort tid å brenne store mengder skogareal. Selv bybrannvesenet må takle skogbranner i området rundt byen. For noen år tilbake ble rundt 152 brannmenn drept på 1990-tallet. Skogbrannrobotikken bruker for å ta fyr og slåss i brann. Denne roboten bruker en ekstern kontrollenhet for trådløs kommunikasjonsformål. Modulen er koblet til med utgangsenden som brukes til skogbrannslukking av roboten. Applikasjonene som trykksensor, temperatursensor, smogsensor, infrarød sensor, brukes til å kontrollere skogsbrannroboten.
På forespørsel!
Mens jeg har gitt en grunnleggende ide om roboten med en metalldetektor, eksisterer det fortsatt et stort spørsmål - Hvordan veilede roboten på ujevne terreng som er ukjente, spesielt i miljøer som er utsatt for kraftig regn, støv og varme temperaturområder. For å finne svar og legg inn kommentarene dine.