
Introduksjon til innebygde systemer
Systemet der dedikert formål med programvare er innebygd i en maskinvaredesign, er kjent som innebygd system. Dette systemet kan enten være et uavhengig system eller et større system. Programvaren blir vanligvis innebygd i minnemoduler som ROM, og den trenger ikke noe sekundært minne som i en datamaskin. Telekom, smartkort, missiler, datanettverk, digital forbrukerelektronikk og satellitter er noen av de innebygde systemapplikasjonene.

Innebygde systemapplikasjoner
Innebygde systemapplikasjoner inkluderer robotikk, digitalt kamera, multi-tasking leker, matlagings- og vaskesystemer, biomedisinske systemer, tastaturkontrollere, mobiltelefoner og smarttelefoner, databehandlingssystemer, elektronisk smart vektdisplaysystem og underholdningssystemer, som videoer, spill, musikk videospill og så videre.
Innebygd systemdesignprosess kan gjøres ved simulering først, som brukes til å teste kretsen fordi det å bytte maskinvare blir veldig vanskelig hvis kretsen ikke fungerer. Hvis resultatene matches med de ønskede resultatene, vil prosessen utformes permanent av sekvensielle wafer-prosesser.
Grunnleggende om innebygde systemer
Innebygde systemer er designet for å utføre bestemte oppgaver, men kan ikke brukes som generelle datamaskiner for å utføre forskjellige oppgaver. Programvaren for innebygd system er vanligvis referert til som firmware, som kan lagres på en plate eller i en enkelt brikke. De to hovedelementene i systemene er:
- Innebygd systemmaskinvare
- Innebygd systemprogramvare

Innebygd maskinvare og programvare
Innebygd systemmaskinvare : Et innebygd system krever en maskinvareplattform for å samhandle med forskjellige sanntidsinnganger og -utganger eller -variabler. Maskinvaren inkluderer kontroller som mikrokontroller eller mikroprosessor , minnemoduler, I / O-grensesnitt, skjermsystemer og kommunikasjonsmoduler, etc.
Innebygd systemprogramvare : Denne programvaren tillater programmering på ønsket måte slik at den kontrollerer forskjellige operasjoner. Den er skrevet i et høyt nivåformat, samlet til kode og deretter dumpet i maskinvarekontrollere.
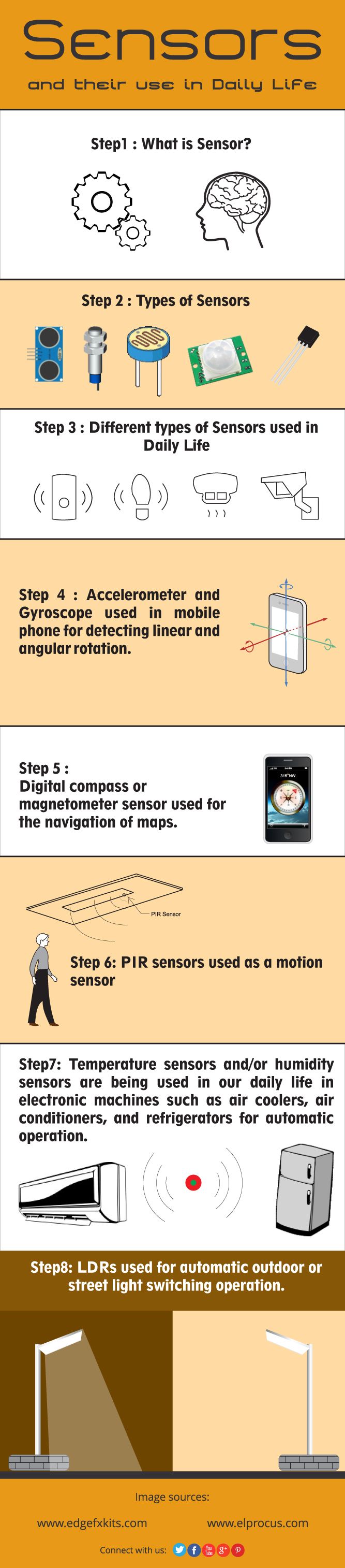
Innebygde systemer i sanntid er datasystemer som utfører handlingene, for eksempel overvåking, respons og kontroll av ekstern bevegelse. Det eksterne miljøet er koblet til datasystemet gjennom sensorer , aktuatorer og I / O-grensesnitt. Et ekte datasystem innebygd med et datasystem er kjent som sanntids innebygd system. Et sanntids innebygd system brukes i forskjellige felt som militær, offentlige sektorer og medisinsk.
Robotiske sanntidsprosjekter i innebygde systemer
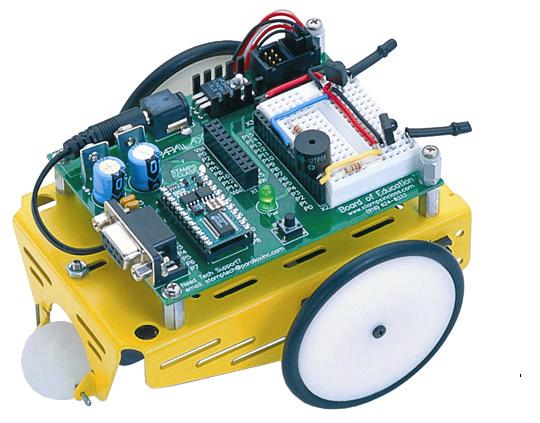
Innebygde systemer kan brukes i mange av sanntidsapplikasjoner som biler, robotikk, industri, etc. Følgende sanntidsprosjekter er relatert til robotteknologi .
1. Stemmekontrollert robotkjøretøy med langdistanse talegjenkjenning
Målet med dette prosjektet er å kontrollere et robotkjøretøy ved hjelp av talekommandoer for fjernstyring. An 8051 mikrokontroller brukes med en talegjenkjenningsmodul for å utføre den ønskede operasjonen. Den bruker en 8051 mikrokontroller, en talegjenkjenningsmodul, en trykknapp, en RF-modul, en koder, en dekoder, en motor-driver-IC, DC-motorer, batterier og andre diverse komponenter.

Stemmekontrollert robotkjøretøy-sender
Kjøretøybevegelser som venstre, høyre, opp og ned kan utføres ved hjelp av trykknapper eller stemmekommandoer av en talegjenkjenningsmodul som er grensesnittet med mikrokontrolleren. Her brukes en kode for å kode kommandoene gitt til mikrokontrolleren ved hjelp av RF-senderen for å overføre signalene med frekvensen 433 MHz.
Derfor, når signaler som dukker opp ved å trykke på knappene, eller stemmekommandosignalene som tilsvarer bevegelsen blir mottatt av mikrocontrolleren, sender den styresignaler til mottakerkretsen gjennom sendermodulen.

Stemmestyrt robotmottaker
Ved mottak av disse signalene, overfører en RF-mottaker disse signalene til en dekoderkrets der binære data blir konvertert til et mikrocontroller-nivå signal. Derfor utfører mikrocontrolleren den ønskede bevegelse fra senderkretsen. Lasermodul er grensesnitt med mikrokontrolleren for å oppdage operasjoner utført av roboten selv på mørke steder.
2. Berøringsskjermbasert fjernstyrt robotkjøretøy for butikkadministrasjon
Dette prosjektet innebærer å kontrollere et robotkjøretøy ved hjelp av en berøringsskjerm enhet for fjernstyring. Et berøringsskjermpanel er plassert i senderenden, og a pick-n-place robot er plassert i mottakerenden for å utføre en oppgave ved å svare på signalene. Maskinvarekomponentene som brukes i dette prosjektet inkluderer en 8051 mikrokontroller, et berøringsskjermpanel, antenner (sender-mottakersiden), en koder, en dekoder, DC-motorer, en robotkropp, et batteri, etc.

Berøringsskjermbasert robotkjøretøy-sender
Som diskutert i talegjenkjenningsmodulen for det ovennevnte prosjektet, sender også i dette prosjektet en berøringsskjermmodul styresignalene som tilsvarer kjøretøyets bevegelse til mikrokontrolleren. Kontrolleren sender deretter disse signalene til koderen, og deretter til senderen som til slutt overfører signalene til mottakerkretsen.

Berøringsskjermbasert robotmottaker
Antennen plassert i mottakerenden mottar RF-signalene fra den sendende antennen, og dekoder dataene, og sender deretter dataene til mikrokontrolleren. Dette oppsettet har fire motorer grensesnittet med mikrokontrolleren: to motorer for bevegelse av armen og griperen og de andre to for bevegelse av kroppen. Alle disse motorene drives av en IC-motordriver som kontinuerlig mottar kommandoene fra mikrokontrolleren.
Dette er de to innebygde systemapplikasjoner innen robotikk. Eksemplene i sanntid på de innebygde systemene kan ha gitt deg en bedre forståelse av konseptet med de innebygde systemene. Hvis du har ytterligere tvil om å implementere disse prosjektene, kan du kontakte oss ved å kommentere nedenfor.
Fotokreditter
- Innebygde systemapplikasjoner samfunn
- Innebygd maskinvare og programvare dca-design

![Kontroller lys, vifte, ved hjelp av TV-fjernkontroll [Full Circuit Diagram]](https://electronics.jf-parede.pt/img/3-phase-power/43/control-lights-fan-using-tv-remote-full-circuit-diagram-1.jpg)




{kind=link}