
Definisjon
En børsteløs likestrømsmotor består av en rotor i form av en permanentmagnet og stator i form av polyfase ankerviklinger. Den skiller seg fra den konvensjonelle likestrømsmotoren slik at den ikke inneholder børster, og kommuteringen gjøres elektrisk ved hjelp av en elektronisk stasjon for å mate statorviklingene.
I utgangspunktet kan en BLDC-motor konstrueres på to måter - ved å plassere rotoren utenfor kjernen og viklingene i kjernen og en annen ved å plassere viklingene utenfor kjernen. I det tidligere arrangementet fungerer rotormagnetene som en isolator og reduserer varmenespredningshastigheten fra motoren og fungerer ved lav strøm. Det brukes vanligvis i fans. I det sistnevnte arrangementet forsvinner motoren mer varme, og forårsaker dermed en økning i dreiemomentet. Den brukes i harddiskstasjoner.

BLDC
4-polet 2-fase motorbruk
Den børsteløse likestrømsmotoren drives av en elektronisk stasjon som bytter forsyningsspenningen mellom statorviklingene når rotoren svinger. Rotorposisjonen overvåkes av transduseren (optisk eller magnetisk) som gir informasjon til den elektroniske kontrolleren, og basert på denne posisjonen bestemmes statorviklingen som skal aktiveres. Denne elektroniske stasjonen består av transistorer (2 for hver fase) som drives via en mikroprosessor.

BLDC-DC
Magnetfeltet som genereres av de permanente magneter, samhandler med feltet indusert av strømmen i statorviklingene, og skaper et mekanisk dreiemoment. Den elektroniske bryterkretsen eller stasjonen bytter strømmen til statoren for å opprettholde en konstant vinkel på 0 til 90 grader mellom de samvirkende feltene. Hall-sensorer er for det meste montert på statoren eller på rotoren. Når rotoren passerer gjennom hallføleren, basert på Nord- eller Sydpolen, genererer den et høyt eller lavt signal. Basert på kombinasjonen av disse signalene, defineres viklingen som skal aktiveres. For å holde motoren i gang, bør magnetfeltet produsert av viklingene skifte stilling når rotoren beveger seg for å ta igjen statorfeltet.

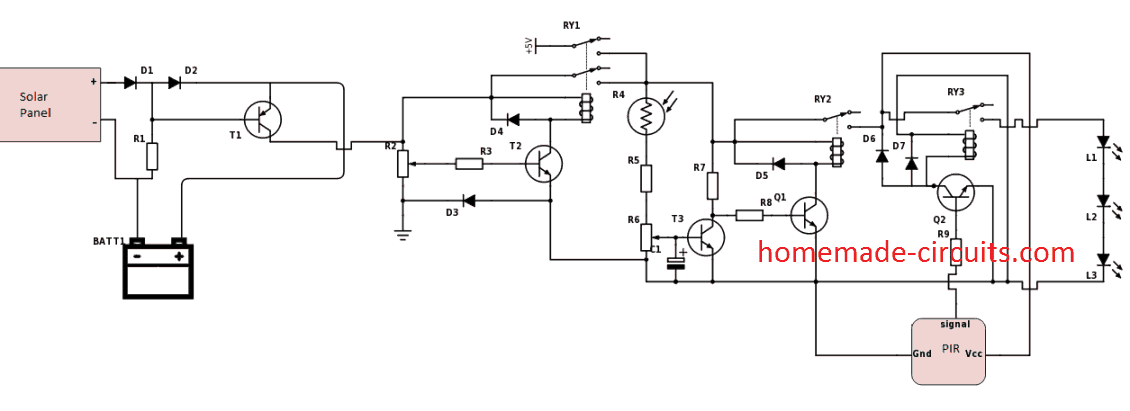
Krets
I en 4-polet, 2-faset børsteløs likestrømsmotor, brukes en enkel hallsensor, som er innebygd på statoren. Når rotoren roterer, registrerer hallføleren posisjonen og utvikler et høyt eller lavt signal, avhengig av magnetens pol (Nord eller Sør). Hall-sensoren er koblet via en motstand til transistorene. Når et høyspenningssignal oppstår ved utgangen til sensoren, begynner transistoren som er koblet til spole A å lede, og gir banen for strømmen å strømme og dermed aktiverer spolen A. Kondensatoren begynner å lade til full forsyningsspenning. Når hallsensoren oppdager en endring i rotoren til rotoren, utvikler den et lavspent signal ved utgangen, og siden transistoren 1 ikke får noen forsyning, er den i cutoff-tilstand. Spenningen utviklet rundt kondensatoren er Vcc, som er forsyningsspenningen til 2ndtransistoren, og spolen B får nå strøm når strømmen går gjennom den.
BLDC-motorer har faste permanente magneter, som roterer og har en fast anker, noe som eliminerer problemene med å koble strøm til det bevegelige ankeret. Og muligens flere stolper på rotoren enn statoren eller motstandsmotorer. Sistnevnte kan være uten permanente magneter, bare stolper som er indusert på rotoren, og deretter trukket inn i et arrangement med tidsbestemte statorviklinger. En elektronisk kontroller erstatter børste / kommutatorenheten til den børstede DC-motoren, som kontinuerlig bytter fase til viklingene for å holde motoren i sving. Kontrolleren utfører komparativ tidsstyrt strømfordeling ved å bruke en halvlederkrets i stedet for børste- / kommutatorsystemet.

BLDC Motor
7 fordeler med børsteløse DC-motorer
- Bedre hastighet kontra dreiemomentegenskaper
- Høy dynamisk respons
- Høy effektivitet
- Lang levetid på grunn av mangel på tap av elektrisk strøm og friksjon
- Lydløs operasjon
- Høyere hastighetsområder
Applikasjoner:
Kostnaden for den børsteløse DC-motoren har gått ned siden presentasjonen, på grunn av fremskritt innen materialer og design. Denne kostnadsreduksjonen, kombinert med de mange fokuspunktene den har over børstens likestrømsmotor, gjør den børsteløse likestrømsmotoren til en populær komponent i mange forskjellige applikasjoner. Programmer som bruker BLDC-motoren inkluderer, men er ikke begrenset til:
- Forbrukerelektronikk
- Transportere
- Oppvarming og ventilasjon
- Industriell ingeniørfag
- Model engineering
Prinsipp for å jobbe
Prinsippene for bruk av BLDC-motorer er de samme som for en børstet DC-motor, dvs. tilbakemeldingen på den indre akselen. Når det gjelder en børstet DC-motor, blir tilbakemelding implementert ved hjelp av en mekanisk kommutator og børster. Innenfor BLDC-motoren oppnås det ved hjelp av flere tilbakemeldingssensorer. I BLDC-motorer bruker vi stort sett en Hall-effekt-sensor, hver gang rotormagnetiske poler passerer nær hall-sensoren, genererer de et HØYT eller LAV-nivå signal, som kan brukes til å bestemme akselens posisjon. Hvis retningen til magnetfeltet blir reversert, vil også den utviklede spenningen reversere.
Styring av en BLDC-motor
Kontrollenheten er implementert av mikroelektronisk har flere høyteknologiske valg. Dette kan implementeres ved hjelp av en mikrokontroller, en dedikert mikrokontroller, en hardkoblet mikroelektronisk enhet, en PLC eller lignende en annen enhet.
Den analoge kontrolleren bruker fortsatt, men den kan ikke behandle tilbakemeldinger og kontrollere deretter. Med denne typen kontrollkretser er det mulig å implementere høyeffektive kontrollalgoritmer, for eksempel vektorkontroll, feltorientert kontroll, høyhastighetsregulering som alle er relatert til motorens elektromagnetiske tilstand. Videre implementeres også ytre sløyfekontroll for forskjellige dynamiske krav som glidende motorstyringer, adaptiv kontroll, prediktiv kontroll ... etc.
Foruten alle disse finner vi høy ytelse PIC (Power Integrated Circuit), ASIC (Application Specific Integrated Circuits) ... etc. som i stor grad kan forenkle konstruksjonen av kontrollen og den kraftelektroniske enheten begge. For eksempel har vi i dag komplett PWM (Pulse Width Modulation) regulator i en enkelt IC som kan erstatte hele kontrollenheten i noen systemer. Compound driver IC kan gi den komplette løsningen for å kjøre alle de seks strømbryterne i en trefasekonverterer. Det er mange lignende integrerte kretser med mer og mer å legge til hver dag. På slutten av dagen vil systemmontering muligens bare omfatte et stykke kontrollprogramvare med all maskinvare som kommer til riktig form og form.
PWM (Pulse Width Modulation) -bølge kan brukes til å kontrollere motorens hastighet. Her er den gjennomsnittlige spenningen gitt, eller den gjennomsnittlige strømmen som strømmer gjennom motoren vil endres avhengig av PÅ og AV-tiden for pulser som styrer motorens hastighet, dvs. bølgenes driftssyklus styrer hastigheten. Når du endrer driftssyklus (PÅ-tid), kan vi endre hastigheten. Ved å bytte utgangsporter vil den effektivt endre motorens retning.
Fartskontroll
Hastighetskontroll av BLDC-motoren er viktig for å få motoren til å fungere med ønsket hastighet. Hastigheten til en børsteløs likestrømsmotor kan styres ved å kontrollere inngangsspenningen. Jo høyere spenning, jo mer er hastigheten. Når motoren fungerer i normal modus eller går under nominell hastighet, endres inngangsspenningen til ankeret gjennom PWM-modellen. Når en motor kjøres over nominell hastighet, svekkes strømmen ved å fremme den utgående strømmen.
Hastighetskontrollen kan være lukket eller åpen loop-hastighetskontroll.
Åpen sløyfehastighetskontroll - Det innebærer ganske enkelt å kontrollere likestrømsspenningen på motorterminalene ved å hakke likestrømsspenningen. Dette resulterer imidlertid i en eller annen form for strømbegrensning.
Lukket loophastighetskontroll - Det innebærer å kontrollere inngangsspenningen gjennom hastighetsfeedback fra motoren. Dermed styres forsyningsspenningen avhengig av feilsignalet.
Den lukkede hastighetskontrollen består av tre grunnleggende komponenter.
- En PWM-krets for å generere de nødvendige PWM-pulser. Det kan enten være en mikrokontroller eller en tidsur-IC.
- En sensorapparat for å registrere den faktiske motorhastigheten. Det kan være en hall-effektsensor, en infrarød sensor eller en optisk koder.
- En motordrift for å kontrollere motorens drift.
Denne teknikken for å endre forsyningsspenningen basert på feilsignalet kan enten være gjennom pid-kontrollteknikken eller ved å bruke uklar logikk.
Påføring på hastighetskontroll av børsteløs DC-motor

BLDC DC Motor Control
Motordriften styres ved hjelp av en optokobler og et MOSFET-arrangement, der inngangsstrøm styres gjennom PWM-teknikken fra mikrokontrolleren. Når motoren roterer, blir den infrarøde ledningen som er tilstede på akselen opplyst med hvitt lys på grunn av tilstedeværelsen av en hvit flekk på akselen og reflekterer det infrarøde lyset. Fotodioden mottar dette infrarøde lyset og gjennomgår en endring i motstanden, og forårsaker dermed en endring i forsyningsspenningen til den tilkoblede transistoren, og det blir gitt en puls til mikrokontrolleren for å generere antall rotasjoner per minutt. Denne hastigheten vises på LCD-skjermen.
Den nødvendige hastigheten legges inn i tastaturet som er grensesnittet til mikrokontrolleren. Forskjellen mellom den registrerte hastigheten og den ønskede hastigheten er feilsignalet, og mikrokontrolleren genererer PWM-signalet i henhold til feilsignalet, basert på den uklare logikken for å gi DC-inngangen til motoren.
Ved å bruke lukket sløyfekontroll kan hastigheten til den børsteløse likestrømsmotoren styres og den kan bringes til å rotere med hvilken som helst ønsket hastighet.
Fotokreditt:







{kind=link}