I dette innlegget skal vi konstruere en 10-kanals fjernkontrollbryter basert på ISM (industriell, vitenskapelig og medisinsk) bånd.
Introduksjon
De ISM-bånd drives av 2,4 GHz, som kan brukes uten lisensiering med rimelig effekt.
Det foreslåtte prosjektet er PÅ / AV-bryter for generell bruk, som kan brukes til å slå PÅ / AV-lys, vifter, husholdningsapparater til hjemmeautomatisering hvis de er sikre nok til å endre maskinvare eller programvare til dette prosjektet.
Prosjektet er delt i to deler: Fjernkontrollen og mottakeren.
Fjernkontrollen:
Fjernkontrollen består av 10 trykknapper for å kontrollere 10 individuelle reléer på mottakeren. Fjernkontrollen drives av 9V batteri som gjør den bærbar.
The Heart of the project of er 2,4 GHz transceiver-modul NRF24L01 som gjør kommunikasjonen mellom to Arduinos mulig.
Fjernkontrollen har en bekreftelses-LED.
Bekreftelses-LED-lampen vil lyse opp hver gang når vi trykker på en knapp på fjernkontrollen, og bare hvis det sendte signalet mottas av mottakeren, og deretter sender mottakeren et tilbakemeldingssignal tilbake til fjernkontrollen for å utløse LED-lampen.
Denne prosessen vil sikre at fjernkontrollens PÅ / AV-kommando er nådd sitt mål med visuell bekreftelse.
En PÅ / AV-bryter er gitt i fjernkontrollens krets for å forhindre overdreven energitap mens den er på tomgang.
Arduino Nano eller Arduino Pro-mini anbefales for å konstruere fjernkontrollen, da den er i en mindre formfaktor som gjør bærbar.
Kretsdiagram:

Ovennevnte er det komplette kretsskjemaet for fjernkontrollen. Pinneforbindelsesdiagrammet for NRF24L01 er også gitt i samme skjema.
Slå av fjernkontrollen når du er ferdig.
Last ned biblioteksfilen her: github.com/nRF24/RF24.git
Program for fjernkontroll:
//-----Program Developed by R.Girish----//
#include
#include
RF24 radio(9,10)
const byte address[][6] = {'00001', '00002'}
const int ip1 = 2
const int ip2 = 3
const int ip3 = 4
const int ip4 = 5
const int ip5 = 6
const int ip6 = 7
const int ip7 = 8
const int ip8 = A0
const int ip9 = A1
const int ip10 = A2
const int buzzer = A3
char buzzchar[32] = ''
const char constbuzzer[32] = 'buzz'
const char button1[32] = 'activate_1'
const char button2[32] = 'activate_2'
const char button3[32] = 'activate_3'
const char button4[32] = 'activate_4'
const char button5[32] = 'activate_5'
const char button6[32] = 'activate_6'
const char button7[32] = 'activate_7'
const char button8[32] = 'activate_8'
const char button9[32] = 'activate_9'
const char button10[32] = 'activate_10'
void setup()
{
pinMode(ip1, INPUT)
pinMode(ip2, INPUT)
pinMode(ip3, INPUT)
pinMode(ip4, INPUT)
pinMode(ip5, INPUT)
pinMode(ip6, INPUT)
pinMode(ip7, INPUT)
pinMode(ip8, INPUT)
pinMode(ip9, INPUT)
pinMode(ip10, INPUT)
pinMode(buzzer, OUTPUT)
digitalWrite(ip1, HIGH)
digitalWrite(ip2, HIGH)
digitalWrite(ip3, HIGH)
digitalWrite(ip4, HIGH)
digitalWrite(ip5, HIGH)
digitalWrite(ip6, HIGH)
digitalWrite(ip7, HIGH)
digitalWrite(ip8, HIGH)
digitalWrite(ip9, HIGH)
digitalWrite(ip10, HIGH)
radio.begin()
radio.openWritingPipe(address[1])
radio.openReadingPipe(1, address[0])
radio.setChannel(100)
radio.setDataRate(RF24_250KBPS)
radio.setPALevel(RF24_PA_MAX)
radio.stopListening()
}
void loop()
{
if(digitalRead(ip1) == LOW)
{
radio.write(&button1, sizeof(button1))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip2) == LOW)
{
radio.write(&button2, sizeof(button2))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip3) == LOW)
{
radio.write(&button3, sizeof(button3))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip4) == LOW)
{
radio.write(&button4, sizeof(button4))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip5) == LOW)
{
radio.write(&button5, sizeof(button5))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip6) == LOW)
{
radio.write(&button6, sizeof(button6))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip7) == LOW)
{
radio.write(&button7, sizeof(button7))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip8) == LOW)
{
radio.write(&button8, sizeof(button8))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip9) == LOW)
{
radio.write(&button9, sizeof(button9))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
if(digitalRead(ip10) == LOW)
{
radio.write(&button10, sizeof(button10))
radio.startListening()
while(!radio.available())
radio.read(&buzzchar, sizeof(buzzchar))
if(strcmp(buzzchar,constbuzzer) == 0)
{
digitalWrite(buzzer, HIGH)
delay(500)
digitalWrite(buzzer,LOW)
}
radio.stopListening()
}
}
//-----Program Developed by R.Girish----//
Det avslutter fjernkontrollkretsen.
Mottakeren:
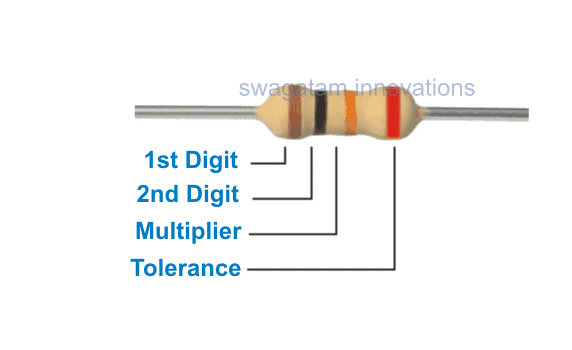
Mottakerkretsen består av Arduino som kan være ditt valg, 10 strømbegrensende motstander på 330 ohm, 10 transistorer og 10 relé danner utgangstrinnet.
På hver av de 10 utgangspinnene til Arduino er koblet til 10 reléer via motstand og transistor.
Forsikre deg om at strømforsyningen din kan gi minst 1A strøm som er nødvendig for å betjene flere releer på et øyeblikk.
En 2,4 GHz transceiver-modul NRF24L01 gir kommunikasjon mellom fjernkontrollen.
Kretsdiagram:

Hvis du er forvekslet med koblingsskjemaet mellom Arduino og NRF24L01-modulen, er det bare å ta en titt på tabellen ved siden av skjematisk, det er det samme for fjernkontrollkrets.
Utgangssekvensen og utgangspinnene er som følger:
Arduino PIN - Utgangssekvens
PIN 2 - UTGANG 1
PIN 3 - UTGANG 2
PIN 4 - UTGANG 3
PIN 5 - UTGANG 4
PIN 6 - UTGANG 5
PIN 7 - UTGANG 6
PIN 8 - UTGANG 7
PIN A0 - UTGANG 8
PIN A1 - UTGANG 9
PIN A2 - UTGANG 10
Utgangstrinn:

Utgangen vises bare med to utgangstrinn for enkelhet i diagrammet. Du må utvide den til ti hvis du bruker alle de 10 kanalene.
Program for mottaker:
//-----Program Developed by R.Girish----//
#include
#include
RF24 radio(9,10)
const byte address[][6] = {'00001', '00002'}
const int op1 = 2
const int op2 = 3
const int op3 = 4
const int op4 = 5
const int op5 = 6
const int op6 = 7
const int op7 = 8
const int op8 = A0
const int op9 = A1
const int op10 = A2
const char buzzer[32] = 'buzz'
char buttonstate[32] = ''
const char button1[32] = 'activate_1'
const char button2[32] = 'activate_2'
const char button3[32] = 'activate_3'
const char button4[32] = 'activate_4'
const char button5[32] = 'activate_5'
const char button6[32] = 'activate_6'
const char button7[32] = 'activate_7'
const char button8[32] = 'activate_8'
const char button9[32] = 'activate_9'
const char button10[32] = 'activate_10'
boolean status1 = false
boolean status2 = false
boolean status3 = false
boolean status4 = false
boolean status5 = false
boolean status6 = false
boolean status7 = false
boolean status8 = false
boolean status9 = false
boolean status10 = false
void setup()
{
Serial.begin(9600)
pinMode(op1, OUTPUT)
pinMode(op2, OUTPUT)
pinMode(op3, OUTPUT)
pinMode(op4, OUTPUT)
pinMode(op5, OUTPUT)
pinMode(op6, OUTPUT)
pinMode(op7, OUTPUT)
pinMode(op8, OUTPUT)
pinMode(op9, OUTPUT)
pinMode(op10, OUTPUT)
radio.begin()
radio.openReadingPipe(1, address[1])
radio.openWritingPipe(address[0])
radio.setChannel(100)
radio.setDataRate(RF24_250KBPS)
radio.setPALevel(RF24_PA_MAX)
radio.startListening()
}
void loop()
{
while(!radio.available())
radio.read(&buttonstate, sizeof(buttonstate))
Serial.println(buttonstate)
if((strcmp(buttonstate,button1) == 0) && status1 == false)
{
digitalWrite(op1, HIGH)
status1 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button1) == 0) && status1 == true)
{
digitalWrite(op1, LOW)
status1 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button2) == 0) && status2 == false)
{
digitalWrite(op2, HIGH)
status2 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button2) == 0) && status2 == true)
{
digitalWrite(op2, LOW)
status2 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button3) == 0) && status3 == false)
{
digitalWrite(op3, HIGH)
status3 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button3) == 0) && status3 == true)
{
digitalWrite(op3, LOW)
status3 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button4) == 0) && status4 == false)
{
digitalWrite(op4, HIGH)
status4 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button4) == 0) && status4 == true)
{
digitalWrite(op4, LOW)
status4 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button5) == 0) && status5 == false)
{
digitalWrite(op5, HIGH)
status5 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button5) == 0) && status5 == true)
{
digitalWrite(op5, LOW)
status5 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button6) == 0) && status6 == false)
{
digitalWrite(op6, HIGH)
status6 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button6) == 0) && status6 == true)
{
digitalWrite(op6, LOW)
status6 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button7) == 0) && status7 == false)
{
digitalWrite(op7, HIGH)
status7 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button7) == 0) && status7 == true)
{
digitalWrite(op7, LOW)
status7 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button8) == 0) && status8 == false)
{
digitalWrite(op8, HIGH)
status8 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button8) == 0) && status8 == true)
{
digitalWrite(op8, LOW)
status8 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button9) == 0) && status9 == false)
{
digitalWrite(op9, HIGH)
status9 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button9) == 0) && status9 == true)
{
digitalWrite(op9, LOW)
status9 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button10) == 0) && status10 == false)
{
digitalWrite(op10, HIGH)
status10 = true
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
else if((strcmp(buttonstate,button10) == 0) && status10 == true)
{
digitalWrite(op10, LOW)
status10 = false
radio.stopListening()
for(int i = 0 i <10 i++)
{
radio.write(&buzzer, sizeof(buzzer))
delay(10)
}
radio.startListening()
}
}
//-----Program Developed by R.Girish----//
Det avslutter mottakeren.
Den har en teoretisk rekkevidde på 100 meter, praktisk talt kan den fungere rundt 30 meter og over, den kan variere avhengig av de solide hindringene mellom fjernkontroll og mottaker.
Hvordan betjene dette prosjektet:
• Slå på mottakeren først og deretter Fjernkontrollen.
• Trykk på en av knappene på fjernkontrollen en om gangen.
• Hvis du trykker på den første knappen, blir den tilsvarende utgangen utløst, dvs. at utgang 1 slås PÅ. Hvis du trykker på den samme knappen på fjernkontrollen igjen, vil den slå AV utgangen 1 på mottakeren.
• Det gjelder for alle knappene og de 10 utgangene.
• Slå av fjernkontrollen etter bruk.
Hvis du har ytterligere spørsmål angående den ovenfor omtalte 2,4 GHz 10-kanals fjernkontrollbryteren, kan du uttrykke dem i kommentarseksjonen.
Forrige: Arduino PWM Signal Generator Circuit Neste: Hvordan kjøre en servomotor ved hjelp av IC 555